
Technical Reference
By Eliot
This page acts as a quick reference to the most important technical details of the main products in each category. It is primarily intended for quickly accessing several technical documents or comparing similar products by their main properties.
Additional details can be found in the linked product pages, and not all products are covered from each linked category.
“End of Life”/”Discontinued” and “Retired” tags indicate Blue Robotics is no longer sourcing more of a product, or no longer selling it.
Feedback and suggestions are welcome in the Technical Reference forum thread.
Vehicles and Accessories
Vehicles
These vehicles offer high-performance at affordable prices. They use open-source electronics and software and offer plenty of expandability, making them perfect for inspections, research, and adventuring.| Vehicle | Thrusters | Control Axes | Dimensions | 3D Models |
|---|---|---|---|---|
BlueROV2 | Vertical: 2 Horizontal: 4 (vectored) Bollard Thrust: Forward (45°): 9 kgf Vertical: 7 kgf Lateral (45°): 9 kgf | Degrees of Freedom: 5 Heave (up/down) Surge (forward/back) Sway (left/right) Yaw (turning) Roll (lean side down) | Length: 457 mm (18 in) Width: 338 mm (13.3 in) Height: 254 mm (10 in) | BLUEROV2-R4 (.zip) BLUEROV2-R3 (.zip) BLUEROV2-R1 (.zip) |
BlueROV2 Heavy | Vertical: 4 Horizontal: 4 (vectored) Bollard Thrust: Forward (45°): 9 kgf Vertical: 14 kgf Lateral (45°): 9 kgf | Degrees of Freedom: 6 Heave (up/down) Surge (forward/back) Sway (left/right) Yaw (turning) Pitch (tilt nose) Roll (lean side down) | Length: 457 mm (18 in) Width: 575 mm (22.6 in) Height: 254 mm (10 in) | BlueROV2 Heavy 3D Model (GrabCAD) BROV2-HEAVY-FILES (.zip) |
BlueBoat | Horizontal: 2 (forwards) Bollard Thrust: Forward: 8.2 kgf | Degrees of Freedom: 2 Surge (forward/back) Yaw (turning) | 120 x 93 x 46 cm (deployed) 120 x 71 x 24 cm (folded) 120 x 46 x 20 cm (packaged) | BLUEBOAT_120_BR-101447_RevA_PUB (.zip) BLUEBOAT_HULL_SET_BR-101652 (.zip) BLUEBOAT_STARBOARD_HATCH_LID_ASSEMBLY_BR-101667 (.zip) BLUEBOAT_PORT_HATCH_LID_ASSEMBLY_BR-101745 (.zip) BLUEBOAT_CROSSBARS_BRACKETS_BR-101645 (.zip) BLUEBOAT_CROSSTUBE_BR-101639 (.zip) |
| [Retired] BlueROV  | Vertical: 3 Horizontal: 3 Bollard Thrust: Forward: 4.72 kgf Vertical: 7.08 kgf Lateral: 2.36 kgf | Degrees of Freedom: 6 Heave (up/down) Surge (forward/back) Sway (left/right) Yaw (turning) Pitch (tilt nose) Roll (lean side down) | Length: 483 mm (19 in) Width: 330 mm (13 in) Height: 267 mm (10.5 in) | BlueROV 3D Model (GrabCAD) BROV-R1 (.SLDPRT) BROV-R1 (.STEP) BROV-R1 (.IGS) BROV-R1 (.STL) |
Frames and Mounting
| Component | Usage | Material / Finish | Weight | Models |
|---|---|---|---|---|
BlueROV2 Frame | Base frame of the BlueROV2. Supports the enclosures, 6 thrusters, buoyancy foam, ballast, lights, and gripper. | HDPE, black | ||
BlueROV2 Heavy Thruster Guards | Heavy extension frame for the BlueROV2. Supports four vertical thrusters, with handles for convenient carrying. | HDPE, black | BROV2-HEAVY-FILES (.zip) | |
BlueROV2 Payload Skid | Add-on frame to the BlueROV2, for mounting custom payloads. | HDPE, black | BROV2_PAYLOAD_SKID_BR-100233 (.zip) | |
BlueROV2 Roof Rack | A rack for mounting payloads on top of the BlueROV2. | Aluminum 5052-H34 | 177 g | ROOF_RACK_BR-102258_PUBLIC (.zip) |
BlueROV2 Fairing | Protection for main BlueROV2 buoyancy foam. | Polycarbonate, blue | BLUEROV2_FAIRING_BR-100256 (.zip) |
|
BlueROV2 Heavy Fairing Add-on | Protection for additional buoyancy foam on BlueROV2 heavy configuration. | Polycarbonate, blue | BROV2-HEAVY-FILES (.zip) | |
Watertight Enclosure RAILS set | Internal mounting RAILS for cylindrical enclosures. Lengths range from 98 - 430 mm. | Aluminum 6061-T6, type III anodized | 8 - 68 g | WTE_RAILS (.zip) |
Rectangular RAILS Trays | Rectangular internal mounting trays compatible with the RAILS system. Sizes range from 43x36 mm - 105x180 mm. | ABS plastic, black | 5 - 85 g | WTE_RAILS_RECTANGULAR_TRAYS (.zip) |
Circular RAILS Trays | Circular internal mounting trays compatible with the RAILS system. Diameters range from 49 - 199 mm. | ABS plastic, black | 7 - 137 g | WTE_RAILS_CIRCULAR_TRAYS (.zip) |
Electronics Tray (4" Series) | Internal mounting tray for 4" enclosure electronics in the BlueROV2. | ABS, black Aluminum, anodized blue | ETRAY-ASM-TRAY-R1 (.zip) ETRAY-ASM-TRAY-WITH-ELECTRONICS-R1 (.zip) |
|
Enclosure Cradles (4" Series) | Mounts to hold the 4" electronics enclosure on the BlueROV2. | Aluminum 6061-T6 | 84 g | VBROV-M-CRADLE-EXTRUSION-R1 (.zip) |
Watertight Enclosure Clamps | Mounts to hold enclosures in place against a flat surface, or each other. | Aluminum 6061-T6, type III anodized Buna-N 50A Stainles steel 316 | 50 mm (2"): 54 g 75 mm (3"): 161 g 100 mm (4"): 192 g 130 mm (5"): 599 g 150 mm (6"): 645 g 200 mm (8"): 822 g | WTE2_CLAMP_BR-102710-002 (.zip) WTE3_CLAMP_BR-102710-003 (.zip) WTE4_CLAMP_BR-102710-004 (.zip) WTE5_CLAMP_BR-102710-005 (.zip) WTE6_CLAMP_BR-102710-006 (.zip) WTE8_CLAMP_BR-102710-008 (.zip) |
| [Retired] Enclosure Clamps (old style) 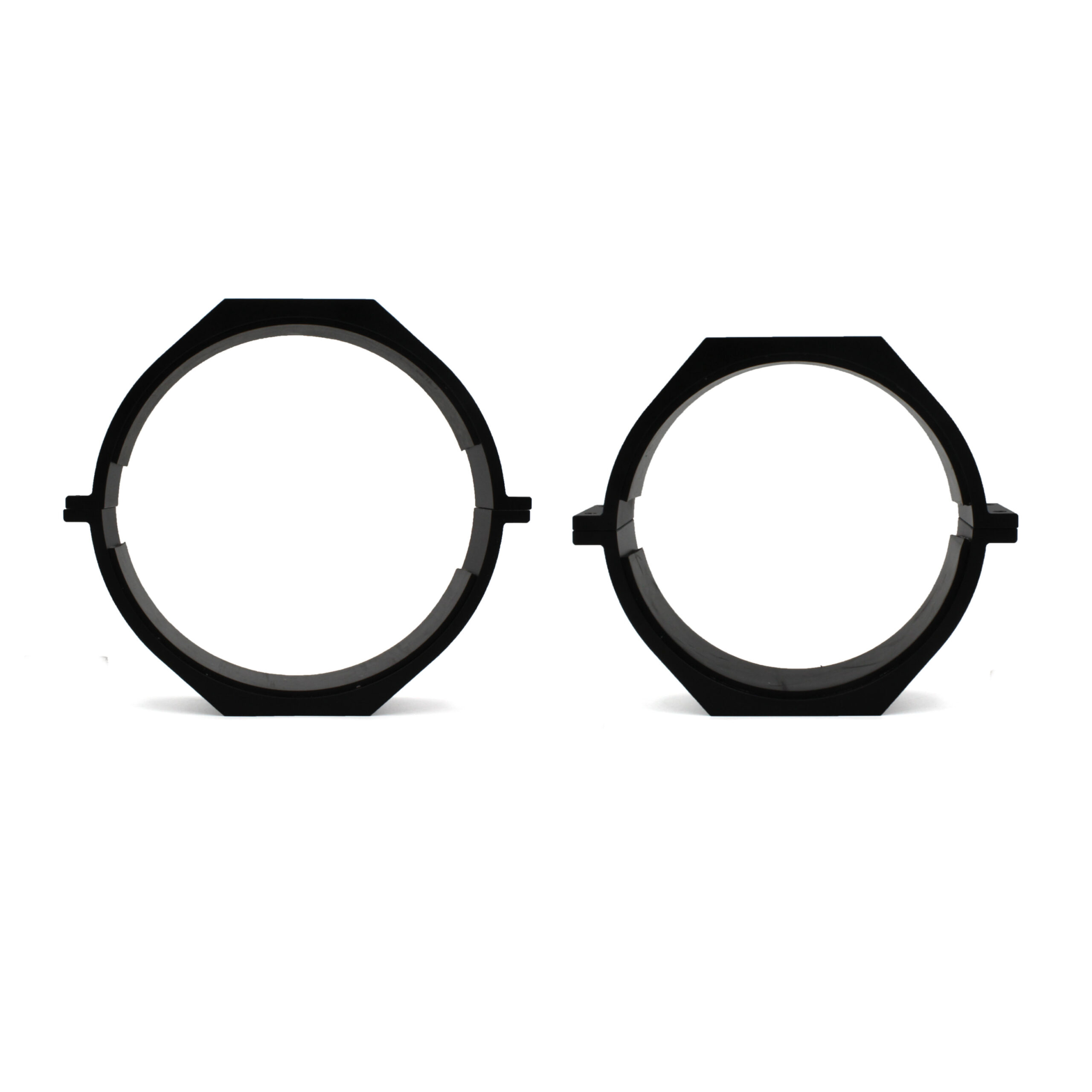 | Mounts to hold enclosures in place against a flat surface. | Aluminum 6061-T6, type II anodized | 50 mm (2"): 21 g 75 mm (3"): 67 g 100 mm (4"): 84 g | WTE2_CLAMP_BR-102474_PUBLIC (.zip) WTE3-M-CLAMP-R1 (.zip) WTE4-M-CLAMP-R1 (.zip) |
T200 Mounting Bracket | Enables more versatile mounting options for the T200 Thruster. | Polycarbonate | T100-P-BRACKET-R1 (.zip) | |
BlueBoat Hull Set | Hulls for the BlueBoat. | LDPE | BLUEBOAT_HULL_SET_BR-101652 (.zip) | |
BlueBoat Hull Bushings | Bushings for mounting parts near the base of the BlueBoat hulls. Recommended for use with M6 or #10 socket head cap screws | Stainless steel 316, black oxide coated | ||
BlueBoat Payload Bracket | A hull mount for holding payloads below the waterline on the BlueBoat. | Aluminum 6061-T6, type II anodized | 280 g | PAYLOAD_BRACKET_BR-101337_RevA_PUBLIC (.zip) |
Ping Integration Kit for BlueBoat | Components for mounting a Ping2 Echosounder on a BlueBoat. | Aluminum 6061-T6 | w/o sonar: 68.5 g | PING2_MOUNT_FOR_BLUEBOAT_BR-102407 (.zip) |
BlueBoat Antenna and Accessory Mast | A foldable mast for mounting an antenna or accessory on a BlueBoat, raised and/or at an angle. | Mast: Aluminum 6063-T6 type III anodized Brackets: Polycarbonate 30% glass-filled UV stabilized | 325 g | ANTENNA_AND_ACCESSORY_MAST_BR-103542 (.zip) |
BlueBoat Crossbars and Brackets | A pair of crossbars with brackets for mounting to the BlueBoat. | Crossbars: Aluminum 6061-T6 Brackets: Polycarbonate 30% glass-filled | BLUEBOAT_CROSSBARS_BRACKETS_BR-101645 (.zip) | |
BlueBoat Frame Bushings | Bushings for mounting parts onto the BlueBoat crossbars. | Delrin | ||
BlueBoat Crosstube | Tube for holding cables between the BlueBoat hulls. | EPDM rubber | BLUEBOAT_CROSSTUBE_BR-101639 (.zip) | |
BlueBoat Battery Velcro | Velcro for mounting batteries in the BlueBoat hulls. | Acrylic Velcro | ||
BlueBoat Hull Fairings | Protection for BlueBoat motor cables. | Polycarbonate 30% glass-filled | ||
BlueBoat Hatch Lid (Port) | Hatch lid for the port side BlueBoat hull. | Polycarbonate 30% glass-filled, ABS | BLUEBOAT_PORT_HATCH_LID_ASSEMBLY_BR-101745 (.zip) | |
BlueBoat Hatch Lid (Starboard) | Hatch lid for the starboard side BlueBoat hull. | Polycarbonate 30% glass-filled, ABS | BLUEBOAT_STARBOARD_HATCH_LID_ASSEMBLY_BR-101667 (.zip) | |
BlueBoat Hatch Base and Latches | Mount for the BlueBoat hatch lids. | Polycarbonate 30% glass-filled, Aluminum 6061-T6 |
Visibility and Branding
| Product | Purpose |
|---|---|
High Visibility USV Safety Flag | Alerting people of a nearby USV, to protect them and the vehicle. Commonly used on the BlueBoat. |
Sticker | Highlighting that a vehicle is powered by Blue Robotics components, or sharing your love for our company! |
Thrusters, Actuators, and Lights
Thrusters and Waterproof Motors
These thrusters and motors use our patented flooded design, which makes them powerful, efficient, compact, and affordable. They use three-phase brushless motors optimized for underwater use, and are controlled by a sensorless brushless electronic speed controller (ESC). Bidirectional ESCs (like our BasicESC) can run a motor both forwards and in reverse.| Product | Max Thrust (FWD/REV) | Electrical | Depth (msw) | Propeller | Dimensions | Weight (w/ cable) | 3D Models |
|---|---|---|---|---|---|---|---|
T200 | @12V: 3.71 / 2.92 kg f @16V: 5.25 / 4.1 kg f @20V: 6.7 / 5.05 kg f | Voltage: 7–20 volts Max Current (Power): @12V: 17 Amps (205 Watts) @16V: 24 Amps (390 Watts) @20V: 32 Amps (645 Watts) | Tested: 300+ m | Material: Polycarbonate Blades: 3 Diameter: 414 g Pitch (0.75D): 22.5° | Length: 113 mm Diameter: 100 mm | Air: 427 g Water: 239 g | T200_THRUSTER_BR-100545_BR-100228 (.zip) |
T500 | @12V: 6.0 / 4.0 kg f @16V: 9.3 / 6.2 kg f @20V: 13.0 / 8.5 kg f @24V: 16.1 / 10.5 kg f | Voltage: 7–24 volts Max Current (Power): @12V: 16.9 A @16V: 25.1 A @20V: 34.0 A @24V: 43.5 A | Rating: 300 m | Material: Polycarbonate Blades: 3 Diameter: 114.5 mm | Length: 160 mm Diameter: 141 mm | Air: 1157 g Water: 730 g | T500_THRUSTER_BR-101092 (.zip) |
M200 | [w/ Weedless Propeller] @16V: 5.63 / 2.81 kg f | Voltage: 7–20 volts Max Current (Power): @12V: 17 Amps (205 Watts) @16V: 24 Amps (390 Watts) @20V: 32 Amps (645 Watts) | Tested: 300+ m | [Optional] Material: Glass-filled polycarbonate Blades: 2 Diameter: 112 mm Pitch (0.75D): 14° | [No propeller] Length: 73.6 mm Diameter: 40 mm | Air: 282 g Water: 217 g | M200_STANDARD_BR-101376_PUBLIC (.zip) M200_BB120_BR-101380_PUBLIC (.zip) |
M500 | [No weedless propeller yet] | Voltage: 7–24 V Max Current (Power): @24V: 3.3 A (79 W) | Rating: 300 m | See T500 propeller | [No propeller] Length: 98.45 mm Diameter: 61 mm | Air: 895 g Water: 641 g | M500_MOTOR_BR-103168 (.zip) |
[Retired] T100 | @12V: 2.36 / 1.82 kg f | Voltage: 12 volts Max Current (Power): @12V: 11.5 Amps (130 Watts) | Material: Polycarbonate Blades: 2 Diameter: 76 mm | Length: 101 mm Diameter: 97 mm | Air: 295 g Water: 120 g | T100-THRUSTER-R1 (.zip) |
Speed Controllers (ESCs)
These bi-directional electronic speed controllers allow controlling brushless DC motors like those used in our thrusters. They are controlled by a servo-style PWM signal, where a pulse-width of 1100 μs corresponds to max reverse, 1900 μs max forward, and 1500 μs (+/- 25 μs of deadband) is stopped.| ESCs | Voltage | Max Current | Signal Voltage | Update Rate | 3D Models | Documents | Firmware |
|---|---|---|---|---|---|---|---|
Basic ESC | 7–26 V (2–6S) | 30 A (depends on cooling) | Max: 14 AWG | BESC30-R3 (.zip) | BLHeli_S Version 16.x manual (.pdf) BLHeli_BRBasicESC-R_H_15-Rev.16.6-Multi_170921 (.ini) | BLHeli_S 16.6 | |
Basic ESC 500 | 7–26 V (2–6S) | 50 A (depending on cooling) | 3-pin servo connector (0.1” pitch) (ground, blank, signal) | BESC500-R1 (.zip) | |||
[Retired] Blue ESC | 6-22 V | In water: 35 A In air: 25 A | PWM: 3.3-5 V I2C: 5 V | 50-400 Hz | SimonK tgy | ||
Grippers
A gripper is a useful tool for picking up small objects, attaching recovery lines, or freeing a snagged tether. Other manipulators may be useful in cleaning, inspection, or repair tasks. See this forum post for some community-designed jaw alternatives.| Grippers | Jaw | Pressure Rating | Power | Signal | Weight (w/ cable) | Documents | 3D Models |
|---|---|---|---|---|---|---|---|
Newton Gripper (Sediment Sampler)  | Standard: Grip (at tip): 97N Grip (in middle): 124N Opening: 62 mm Sediment Sampler: Max Collection Volume: 300 cc Cup Diameter: 120 mm Cup Depth: 25 mm | Aluminum 6061-T6 | Supply Voltage: 9–18 V Peak Current: 6 amps | PWM Voltage: 3.3–5 V PWM neutral: 1500 µs PWM open: >1530 µs–1900 µs PWM close: <1470 µs–1100 µs | Air: M5x0.8 Water: 524 g | Newton Gripper Mount Drilling Template (.pdf) Brushed ESC Schematic (.pdf) | NEWTON-GRIPPER-ASM-R3-PUBLIC (.zip) NEWTON-MOUNT-ASM-R1-PUBLIC (.zip) NEWTON_SEDIMENT_SAMPLER_ATTACHMENT_BR-102559 (.zip) |
Lights and Indicators
These lights and indicators can help to see with a camera, or help to find and/or troubleshoot an enclosure.| Lights | Power | Pressure Rating | Signal | Light | 3D Models | Documents |
|---|---|---|---|---|---|---|
Lumen Subsea Light | Supply Voltage (Vin): 7–48 V Peak Current: (15/Vin) A | 500 m | PWM: exponential brightness from 0% at 1100 µs to 100% at 1900 µs pulse-durations ON: Pull signal to logic HIGH (3V - Vin) OFF: Default state / Pull signal wire to ground | Brightness: up to 1,500 lumens Color temperature: 5,700 kelvin Beam Angle: 135 degrees in water | LUMEN-LIGHT-R3-PUBLIC (.zip) | Lumen Schematic (.pdf) XLamp - XHP70B-00-0000-0D0BP20E2 (Cree - current) XLamp - MKRAWT-00-0000-0B00H4051 (Cree - previous) |
NavLight | Supply Voltage (Vin): 5–12 V (16 V*) Power Draw: 2.5 W | 1000 m | ON: Default state OFF: Pull signal to ground *Dims light if Vin > 12V | Brightness: Sides: 180 lm Top: 90 lm Color temperature: 6000K | NAVLIGHT_BR-101284_PUBLIC (.zip) | |
Subsea LED Indicator | Supply Voltage (Vin): Blue, Green, White Indicator: 3–18 VDC Red Indicator: 3–30 VDC Peak Current: Blue, Green, White Indicator: 30 mA Red Indicator: 50 mA | 1000 m [Retired] R1 (red body) Tested depth: 300 m | ON: Supply power (no signal wire) OFF: Default state / Remove power | Colors: White OR Red OR Green OR Blue | LED_INDICATOR_BR-100551-XXX (.zip) | |
Subsea RGB LED Indicator | Supply Voltage (Vin): 3.5–5.5 VDC Peak Current: 36 mA | 1000 m | WS2812 protocol (at Vin ±0.5 VDC) | Colors: RGB (8-bits per channel) | LED_INDICATOR_BR-100551-XXX (.zip) |
Enclosures, Buoyancy, and Ballast
Watertight Enclosures
These configurable watertight enclosures are great for all kinds of marine robotics applications. Modular end-caps give you options, with clear and flat end-caps with holes for cable penetrators and sensors, and domes for cameras.In the 3D Models, M refers to Metal (aluminium), and P refers to Plastic (acrylic or polycarbonate).
See o-rings table for o-ring details.
| Product Type | Series | Material(s) | External Length(s) | Depth Rating | Inner Diameter | 3D Models |
|---|---|---|---|---|---|---|
Tiny Box | Rectangular | Glass-filled Polycarbonate | (without penetrators) 76 x 40 x 33 mm | 500 m | Internal Lengths: 49 x 29 x 20 mm | WetLink-Cable-Splice-Kit-BR-101170 (.zip) |
Watertight Box | Rectangular | Aluminum 6061-T6, type II anodized | (no feet/handles): 1L: 157 x 122 x 88 mm 5L: 322 x 212 x 113 mm | 300 m | Internal Lengths: 1L: 135 x 100 x 74 mm 5L: 300 x 190 x 87 mm | WATERTIGHT_BOX_1L_BR-102603 (.zip) WATERTIGHT_BOX_5L_BR-102653 (.zip) 3D printable hardware mounting brackets |
Watertight Enclosure Tubes | Cylindrical Locking Series (2-8") | Aluminum 6061-T6, type III anodized / Cast Acrylic Precision machined ends | 50 mm (2"): 100 mm 150 mm 300 mm 75 mm (3"): 150 mm 240 mm 300 mm 400 mm 100 mm (4"): 200 mm 300 mm 400 mm 130 mm (5"): 300 mm 500 mm 150 mm (6"): 300 mm 500 mm 200 mm (8"): 300 mm 500 mm | Alum / Acrylic 1000 m / 225 m 1000 m / 130 m 1000 m / 100 m Alum / Acrylic 1000 m / 275 m 1000 m / 150 m 1000 m / 135 m 1000 m / 120 m Alum / Acrylic 1000 m / 140 m 1000 m / 100 m 900 m / 60 m Alum / Acrylic 1000 m / - 650 m / - Alum / Acrylic 800 m / - 800 m / - Alum / Acrylic 800 m / - 800 m / - | Alum / Acrylic 50.0 ± 0.5 mm / 49.5 ± 1.5 mm 79.0 ± 0.5 mm / 76.2 ± 2.0 mm 103.0 ± 0.5 mm / 101.6 ± 2.1 mm 130 ± 0.5 mm / - 150 ± 0.5 mm / - 200 ± 0.5 mm / - | Post racking grooves: WTE2_ACRYLIC_TUBES_BR-100230-XXX (.zip) WTE2_ALUMINUM_TUBES_BR-106277-XXX (.zip) WTE3_ACRYLIC_TUBES_BR-102649-XXX (.zip) WTE3_ALUMINUM_TUBES_BR-106278-XXX (.zip) WTE4_ACRYLIC_TUBES_BR-101052-XXX (.zip) WTE4_ALUMINUM_TUBES_BR-106279-XXX (.zip) WTE5_ALUMINUM_TUBES_BR-106280-XXX (.zip) WTE6_ALUMINUM_TUBES_BR-106281-XXX (.zip) WTE8_ALUMINUM_TUBES_BR-106282-XXX (.zip) Pre racking grooves: WTE2_ALUMINUM_LOCKING_TUBES (.zip) WTE3_ALUMINUM_LOCKING_TUBES (.zip) WTE4_ALUMINUM_LOCKING_TUBES (.zip) WTE5_M_LOCKING_TUBE_300_BR-101409-300 (.zip) WTE5_M_LOCKING_TUBE_500_BR-101409-500 (.zip) WTE6_M_LOCKING_TUBE_300_BR-101411-300 (.zip) WTE6_M_LOCKING_TUBE_500_BR-101411-500 (.zip) WTE8_M_LOCKING_TUBE_300_BR-101412-300 (.zip) WTE8_M_LOCKING_TUBE_500_BR-101412-500 (.zip) |
O-Ring Flanges | Cylindrical Locking Series (2-8") | Aluminum 6061-T6, type III anodized | Inside Tube: 50 mm (2"): 15.5 ± 0.1 mm 75 mm (3"): 19.1 ± 0.1 mm 100 mm (4"): 19.1 ± 0.1 mm 130 mm (5"): 28.0 ± 0.1 mm 150 mm (6"): 30.0 ± 0.1 mm 200 mm (8"): 36.0 ± 0.1 mm | Mounting Hole Circle: 43.0 ± 0.1 mm 68.6 ± 0.1 mm 94.0 ± 0.1 mm 115.0 ± 0.1 mm 142.0 ± 0.1 mm 186.0 ± 0.1 mm | With RAILS support: WTE2_FLANGE_RAILS_BR-100276-998 (.zip) WTE3_FLANGE_RAILS_BR-100647 (.zip) WTE4_FLANGE_RAILS_BR-100665 (.zip) WTE5_FLANGE_RAILS_BR-102200 (.zip) WTE6_FLANGE_RAILS_BR-102201 (.zip) WTE8_FLANGE_RAILS_BR-102202 (.zip) Pre-RAILS: WTE2-M-LOCKING-FLANGE-SEAL-R1 (.zip) WTE3-M-LOCKING-FLANGE-SEAL-R1 (.zip) WTE4-M-LOCKING-FLANGE-SEAL-R1 (.zip) WTE5_LOCKING_FLANGE_BR-102200 (.zip) WTE6_LOCKING_FLANGE_BR-102201 (.zip) WTE8_LOCKING_FLANGE_BR-102202 (.zip) |
|
Coupler Flanges | Cylindrical Locking Series (2-8") | Aluminum 6061-T6, type III anodized | Between Tubes: 50 mm (2"): 12 ± 0.1 mm 75 mm (3"): 15.8 ± 0.1 mm 100 mm (4"): 15.8 ± 0.1 mm | Mounting Hole Circle: 43.0 ± 0.1 mm 68.6 ± 0.1 mm 94.0 ± 0.1 mm | WTE2-COUPLER_FLANGE (.zip) WTE3-COUPLER_FLANGE (.zip) WTE4-COUPLER_FLANGE (.zip) |
|
End Caps / Flange Caps / Domes | Cylindrical Locking Series (2-8") | Aluminum 6061-T6, type II anodized / Cast Acrylic / Hardened polycarbonate Polycarbonate / Aluminum dome retaining rings | End Caps: 50 mm (2"): Acrylic: 500 m (Blank) Aluminum Flange Caps: 1000 m (4 options) 75 mm (3"): Acrylic: 400 m (Blank) Aluminum: 1000 m (3 options) 100 mm (4"): Acrylic: 300 m (Blank) Aluminum (10mm) 1000 m (7 options) 130 mm (5"): Aluminum: 1000 m (4 options) 150 mm (6"): Acrylic: 150 m Aluminum (6 mm): 150 m (3 options) Aluminum (12 mm): 1000 m (3 options) 200 mm (8"): Acrylic: 75 m Aluminum (6 mm): 75 m (2 options) Aluminum (16 mm): 1000 m (4 options) Domes (Hardened polycarbonate): 50 mm (2"): 1000 m 75 mm (3"): 750 m 100 mm (4"): 500 m 1000 m 130 mm (5"): 600 m | Domes: 50 mm (2"): 36 ± 0.2 mm 75 mm (3"): 62.5 ± 0.2 mm 100 mm (4"): 87 ± 0.2 mm 88 ± 0.2 mm 130 mm (5"): 107 ± 0.1 mm | 2" SeriesWTE2_END_CAP_ACRYLIC_BLANK_BR-100094 (.zip) WTE2_FLANGE_CAP_RAILS_BLANK_BR-100276-999 (.zip) WTE2_FLANGE_CAP_RAILS_2xM10_BR-100276-002 (.zip) WTE2_FLANGE_CAP_RAILS_4xM10_BR-100276-004 (.zip) WTE2_FLANGE_CAP_RAILS_1xM10_8xM6_BR-100276-009 (.zip) WTE2_DOME_AND_RETAINING_RING_BR-100859 (.zip) 3" SeriesWTE3_END_CAP_ACRYLIC_BLANK_BR-100949-998 (.zip) WTE3_END_CAP_BLANK_BR-100949-999 (.zip) WTE3_END_CAP_4xM10_BR-100949-004 (.zip) WTE3_END_CAP_7xM10_BR-100949-007 (.zip) WTE3_DOME_AND_RETAINING_RING_BR-101059 (.zip) 4" SeriesWTE4_END_CAP_10xM10_BR-102993-002 (.zip) WTE4_END_CAP_18xM10_BR-102993-003 (.zip) WTE4_END_CAP_4xM14_1xM10_BR-102993-004 (.zip) WTE4_END_CAP_5xM10_BR-102993-005 (.zip) WTE4_END_CAP_8xM14_2xM10_BR-102993-006 (.zip) WTE4_END_CAP_8xM14_7xM10_BR-102993-007 (.zip) WTE4_END_CAP_ACRYLIC_BLANK_BR-102993-998 (.zip) WTE4_END_CAP_BLANK_BR-102993-999 (.zip) WTE4_DOME_AND_RETAINING_RING_BR-100495 (.zip) WTE4_DOME_AND_RETAINING_RING_BR-107201 (.zip) 5" SeriesWTE5_END_CAP_BLANK_BR-102203-001 (.zip) WTE5_END_CAP_5xM14_5xM10_BR-102203-002 (.zip) WTE5_END_CAP_10xM14_7xM10_BR-102203-003 (.zip) WTE5_END_CAP_26xM10_BR-102203-004 (.zip) WTE5_DOME_AND_RETAINING_RING_BR-102597 (.zip) 6" SeriesWTE6_END_CAP_BLANK_BR-102205-001 (.zip) WTE6_END_CAP_5xM14_5xM10_BR-102205-002 (.zip) WTE6_END_CAP_16xM14_13xM10_BR-102205-003 (.zip) WTE6_END_CAP_15xM10_BR-102205-004 (.zip) WTE6_END_CAP_5xM10_BR-102205-005 (.zip) WTE6_END_CAP_BLANK_BR-102205-006 (.zip) WTE6_END_CAP_ACRYLIC_BLANK_BR-102205-007 (.zip) WTE6_END_CAP_12xM14_12xM10_BR-100140 (.zip) 8" SeriesWTE8_END_CAP_BLANK_BR-102206-001 (.zip) WTE8_END_CAP_5xM10_5xM14_BR-102206-002 (.zip) WTE8_END_CAP_10xM10_10xM14_BR-102206-003 (.zip) WTE8_END_CAP_14xM10_16xM14_BR-102206-004 (.zip) WTE8_END_CAP_5xM10_BR-102206-005 (.zip) WTE8_END_CAP_BLANK_BR-102206-006 (.zip) WTE8_END_CAP_ACRYLIC_BLANK_BR-102206-007 (.zip) 2" Pre-RAILS WTE2-M-LOCKING-FLANGE-CAP-BLANK-R1 (.zip) WTE2-M-LOCKING-FLANGE-CAP-2-HOLE-R1 (.zip) WTE2-M-LOCKING-FLANGE-CAP-4-HOLE-R1 (.zip) |
|
Enclosure Tubes | Cylindrical Non-Locking Series (6", 8") | Cast Acrylic | 298mm (11.75") | 6": 65 m 8": 40 m | 6": 151.9 ± 1.5 mm 8": 203.2 ± 1.4 mm | WTE6-P-TUBE-12-R1 (.zip) WTE8-P-TUBE-12-R1 (.zip) |
End Caps | Cylindrical Non-Locking Series (6", 8") | Cast Acrylic / Aluminum | 6": 150 m (5 options) 8": 75 m (3 options) | WTE6_END_CAP_15xM10_BR-102205-004 (.zip) WTE6_END_CAP_5xM10_BR-102205-005 (.zip) WTE6_END_CAP_BLANK_BR-102205-006 (.zip) WTE6_END_CAP_ACRYLIC_BLANK_BR-102205-007 (.zip) WTE6_END_CAP_12xM14_12xM10_BR-100140 (.zip) WTE8_END_CAP_ACRYLIC_BLANK_BR-102206-007 (.zip) WTE8_END_CAP_BLANK_BR-102206-006 (.zip) WTE8_END_CAP_5xM10_BR-102206-005 (.zip) |
||
O-ring Flanges | Cylindrical Non-Locking Series (6", 8") | Aluminum | WTE6-M-FLANGE-SEAL-R1 (.zip) WTE8-M-FLANGE-SEAL-R1 (.zip) |
|||
| [Retired] O-ring Flanges  | Cylindrical Non-Locking Series (2", 3", 4") (Open Source) | Aluminum | WTE2-M-FLANGE-SEAL-R4 (.zip) WTE2-M-FLANGE-SEAL-DRAWING (.png) WTE3-M-FLANGE-SEAL-R2 (.zip) WTE3-M-FLANGE-SEAL-DRAWING (.png) WTE4-M-FLANGE-SEAL-R3 (.zip) |
|||
| [Retired] Enclosure Tubes 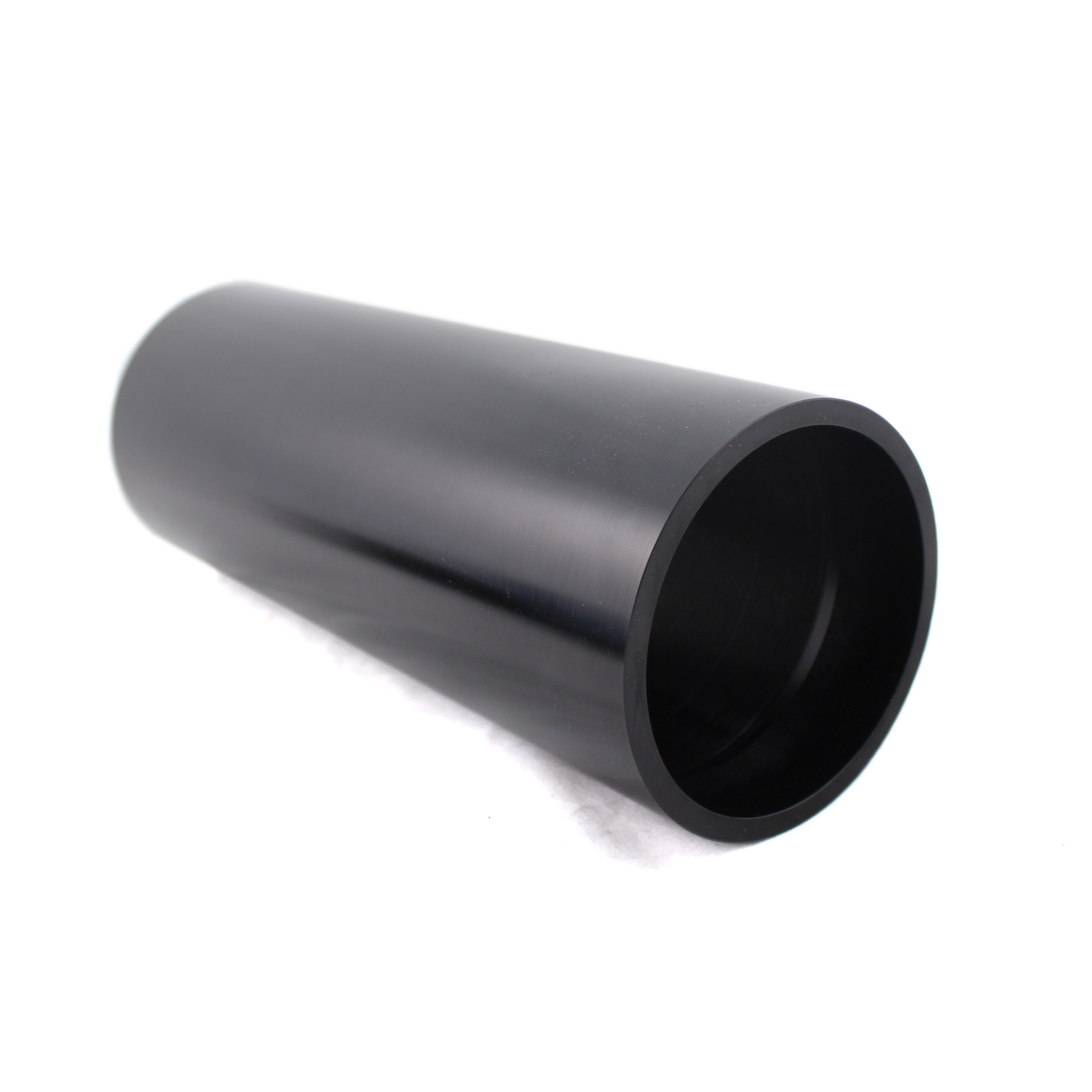 | Cylindrical Non-Locking Series (2", 3", 4") (Open Source) | Cast Acrylic / Aluminum | 2": 12" 3": 8.75", 12" 4": 12" | 2": 100 m 3": 150 m / 400 m 4": 100 m / 400 m | WTE2-P-TUBE-12-R1 (.zip) WTE3-P-TUBE-8P75-R2 (.zip) WTE3-P-TUBE-12-R1 (.zip) WTE3-M-TUBE-8P75-R3 (.zip) WTE4-P-TUBE-12-R2 (.zip) WTE4-M-TUBE-12-R3 (.zip) |
|
| [Retired] Enclosure Tubes (Racking Grooves) 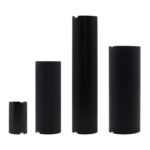 | Cylindrical Locking Series (2-8") | Aluminum 6061-T6, type III anodized | 50 mm (2"): 100 mm 150 mm 300 mm 75 mm (3"): 150 mm 240 mm 300 mm 400 mm 100 mm (4"): 200 mm 300 mm 400 mm 130 mm (5"): 300 mm 500 mm 150 mm (6"): 300 mm 500 mm 200 mm (8"): 300 mm 500 mm | 500 m 500 m 500 m 500 m 500 m 450 m 375 m 500 m 500 m 400 m 500 m 250 m 500 m 500 m 500 m 500 m | 50.0 ± 0.5 mm 79.0 ± 0.5 mm 103.0 ± 0.5 mm 130 ± 0.5 mm 150 ± 0.5 mm 200 ± 0.5 mm | WTE2_ALUMINUM_TUBES_BR-100534-XXX (.zip) WTE3_ALUMINUM_TUBES_BR-100611-XXX (.zip) WTE3_ALUMINUM_TUBES_BR-100611-XXX_RevC (.zip) WTE4_ALUMINUM_TUBES_BR-100195-XXX (.zip) WTE4_ALUMINUM_TUBES_BR-100195-XXX_RevC (.zip) WTE5_ALUMINUM_TUBES_BR-101409-XXX (.zip) WTE6_ALUMINUM_TUBES_BR-101411-XXX (.zip) WTE8_ALUMINUM_TUBES_BR-101412-XXX (.zip) |
| [Retired] End Caps / Flange Caps / Domes  | Cylindrical Non-Locking Series (2", 3", 4") (Open Source blanks) | Cast Acrylic / Aluminum Cast acrylic domes + polycarbonate retaining rings | End Caps: 2": 100 m / 1000 m (0 / 2 holes) 3": 150 m (0 / 4 / 7 holes) 4": 100 m / 500 m (0 / 5 / 10 / 14 holes) Domes: 2": 950 m 3": 750 m 4": 500 m | Open Source Blanks WTE2-P-END-CAP-R2 (.zip) WTE3-P-END-CAP-R1 (.zip) WTE4-P-END-CAP-R1 (.zip) Other WTE2-M-END-CAP-2-HOLE-R1 (.zip) WTE2-P-DOME-R1 (.zip) WTE2-P-RETAINING-RING-R1 (.zip) WTE3-M-END-CAP-4-HOLE-R1 (.zip) WTE3-M-END-CAP-7-HOLE-R1 (.zip) WTE3-P-DOME-R1 (.zip) WTE3-P-RETAINING-RING-R1 (.zip) WTE4-M-END-CAP-5-HOLE-R1 (.zip) WTE4-M-END-CAP-10-HOLE-R1 (.zip) WTE4-M-END-CAP-14-HOLE-R1 (.zip) WTE4-P-DOME-R1 (.zip) WTE4-P-RETAINING-RING-R1 (.zip) |
Buoyancy and Ballast
These buoyancy foams and ballast weights can help to balance a vehicle by shifting its center of volume (buoyancy) and center of mass (gravity). With both points in the same location a vehicle is optimised for pitch and roll rotations, whereas with CoB above CoG there is a self-righting effect that keeps the vehicle upright.| Component | Density | Weight (in air) | Net Buoyancy (Lifting Force) | Tested Depth | Material | Dimensions | 3D Models | Documents |
|---|---|---|---|---|---|---|---|---|
Ballast Weight | 8000 kg/m3 | 191 g | -165 g | N/A | Passivated Stainless Steel (AISI316) | 58 x 42 x 12 mm | BALLAST-200G-R2 (.zip) | |
Subsea Buoyancy Foam: R-3312 | 192 kg/m3 | (1) 50 g (2) 227 g (3) 403 g (4) 1512 g | (1) 212 g (2) 953 g (3) 1694 g (4) 6363 g | Uncoated: 91 m Coated: 182 m | LAST-A-FOAM® R-3312 | (1) 203 x 102 x 13 mm (2) 305 x 152 x 25 mm (3) 406 x 203 x 25 mm (4) 610 x 203 x 64 mm | FLOAT-8X4X0P5-R1 (.zip) FLOAT-12X6X1-R1 (.zip) FLOAT-16X8X1-R1 (.zip) FLOAT-24X8X2P5-R1 (.zip) | Product Data Sheet (PDS) (General Plastics) Product Safety Sheet (SDS) (General Plastics) Compatible Foam Adhesives & Sealants (General Plastics) |
| Subsea Buoyancy Foam: R-3318 | 288 kg/m3 | (1) 148 g (2) 2268 g | (1) 362 g (2) 5598 g | Uncoated: 300 m Coated: 488 m | LAST-A-FOAM® R-3318 | (1) 124 x 86 x 48 mm (2) 610 x 203 x 64 mm | FLOAT-1P9X3P4X4P9-R1 (.zip) FLOAT-24X8X2P5-R1 (.zip) | Product Data Sheet (PDS) (General Plastics) Product Safety Sheet (SDS) (General Plastics) Compatible Foam Adhesives & Sealants (General Plastics) |
BlueROV2 Machined Buoyancy Foam | 288 kg/m3 | 209 g | 488 g | Uncoated: 300 m Coated: 488 m | LAST-A-FOAM® R-3318 | 150 x 86 x 54 mm | FLOAT-R3318-BROV2-R1-RP (.zip) | Material Safety Data Sheet (MSDS) (General Plastics) Compatible Foam Adhesives & Sealants (General Plastics) |
BlueROV2 Heavy Machined Buoyancy Foam | 288 kg/m3 | Uncoated: 300 m Coated: 488 m | LAST-A-FOAM® R-3318 | 104 x 87 x 60 mm | BROV2-HEAVY-FILES (.zip) | R-3318 Material Safety Data Sheet (MSDS) (General Plastics) Compatible Foam Adhesives & Sealants (General Plastics) |
Sensors and Cameras
Temperature and Pressure/Depth Sensors
These sensors have an M10x1.5 thread for mounting, and a face-seal o-ring to prevent water ingress, with a JST-GH connector. Old versions used a DF13 connector instead. They can be used with ArduSub (e.g. on a BlueROV2), or interfaced with directly using code.| Sensors | Operating Depth | Regular Maintenance | Pressure Resolution | Pressure Accuracy | Wet Operating Temperature | Temperature Accuracy | ArduSub Compatible? | Documents | 3D Models | Code Libraries |
|---|---|---|---|---|---|---|---|---|---|---|
| BarXT (3/10/30/100)  Keller 4LD - PA | 0–20 m / 0–92 m / 0–296 m / 0–1009 m | N/A | 0.091 mbar (0.9 mm in freshwater) / 0.31 mbar (3.12 mm in freshwater) / 0.92 mbar (9.36 mm in freshwater) / 3 mbar (31 mm in freshwater) | ± 4.5 mbar (±0.046 m in freshwater) / ± 15 mbar (±0.153 m in freshwater) / ± 45 mbar (±0.46 m in freshwater) / ± 150 mbar (±1.54 m in freshwater) | -10 to 80°C | ± 2°C | Yes | Keller PA-4LD Datasheet (.pdf) Keller LD Communication Protocol (.pdf) BarXT Schematic (.pdf) | BARXT_BR-103242-XXX (.zip) | KellerLD-Arduino KellerLD-Python KellerLD-ArduPilot |
Bar (02 / 30) MS5837-02BA / MS5837-30BA | 0–10 m / 0–295.6 m | Daily drying | .016 mbar (.16 mm in freshwater / .2 mbar (2 mm in fresh water) | ± 2 mbar (2 cm in freshwater) / ±200 mbar (204 cm in freshwater) | 2 to 40°C | ± 2°C / ± 4°C | Yes (>= 4.7) / Yes | MS5837-02BA Data Sheet (.pdf) MS5837-30BA Data Sheet (.pdf) Bar30/Bar02 Schematic (.pdf) | BAR02-ASM-R2-PUBLIC (.zip) BAR30-ASM-R2-PUBLIC (.zip) | MS5837 Arduino MS5837 Python MS5xxx ArduPilot |
Celsius TSYS01 | 0 - 975m | N/A | N/A | N/A | -40 to +125°C | ± 0.1°C (between -5 to 50°C) ± 0.5°C (between -40 to 125°C) | Yes (SCALED_PRESSURE3) | TSYS01 Datasheet (.pdf) Celsius-Temperature-Sensor-Schematic (.pdf) | CELSIUS-SENSOR-R2-PUBLIC (.zip) CELSIUS-SENSOR-R1 (.zip) | TSYS01 Arduino, TSYS01 Python, TSYS01 ArduPilot |
| [Retired] Bar 100  Keller 7LD - PA | 0-1020m | N/A | 3 mbar (3 cm in fresh water) | ± 500 mbar (5.1 m in freshwater) | -40 to 110°C | ± 2°C (between 0 to 50°C) | Yes | Keller PA-7LD Datasheet (.pdf) Keller Communication Protocol 4LD-9LD (.pdf) Keller LD Handling Instructions (.pdf) Bar100 Schematic (.pdf) | BAR100_BR-101752_RevB_PUBLIC (.zip) Bar100 Penetrator Nut (.pdf) | KellerLD-Arduino, KellerLD-Python, KellerLD-ArduPilot |
Cameras
A camera allows the pilot to see and record from the vehicle's point of view. If paired with a Camera Tilt Mount or other gimbal it can be moved during operation. Alternatively, a GoPro-compatible camera can be attached to a 3" enclosure end-cap (or other flat surface) by 3D printing this mount.| Camera | Lens | Sensor | Video Stream | Audio | Electrical | Weight | Dimensions | 3D Models | Documents |
|---|---|---|---|---|---|---|---|---|---|
Low-Light HD USB Camera Sony Exmor IMX322 / IMX323 | Mount: M12 x 0.5 Field of View: 80° (H) x 64° (V) Focal Length: 2.97 mm | Format: 1/2.9" Pixel Size: 2.8µm (H) x 2.8µm (V) Minimum Illumination: 0.01 lux | Standards: 240p15 - 1080p30 Formats: H.264 / MJPEG / YUV2(YUYV) | single-channel, 44.1 kHz, Linear-PCM (L16) | Supply Voltage: 5 V Max Current: 220 mA | w/ cable: 17g w/o cable: 13.5g | PCB: 32mm x 32mm Mounting Holes: 28mm x 28mm (2.44mm) PCB to lens: 23.25mm | CAM-USB-WIDE-R1 (.zip) CAMTILT-P-LOW-LIGHT-HD-USB-R7 (.zip) | Sony IMX323 Datasheet (.pdf) |
DeepWater Exploration exploreHD USB Camera  Sony Exmor 1/2.9" CMOS | Depth Rating: 400 m Field of View: ~82° (H) in water Focal Length: 2.65mm | Format: 1/2.9" | Standards: 240p10 - 1080p30 Formats: H.264, MJPEG, YUY2 | N/A | Supply Voltage: 5V Max Current: 260 mA | in air: 84 g in water: 44 g | Overall Outer Diameter: 39 mm | DWE_EXPLOREHD_BR-103870 (.zip) | |
MarineSitu C3 Stereo Camera Sony Exmor IMX378 + OmniVision OV9282 | Depth Rating: 1000 m Field of View: Center: 66.5° (H) x 52.5° (V) Stereo pair: 80° (H) x 55.5° (V) Focal Range: Center: 60 cm–infinity Stereo pair: 18 cm–infinity | Center: Type: color Shutter: rolling Format: 1/2.3" Pixel size: 1.5 µm Stereo pair: Type: mono Shutter: global Format: 1/4" Pixel size: 3 µm | Different profiles available depending on application. 12 MP color camera, 1 MP stereo pair cameras Max: 60 FPS color, 120 FPS stereo | N/A | Supply Voltage: 12–24V Power Consumption: 3 watt nominal, 5 watt max @ 12V | in air: 1700 g in water: 430 g | Enclosure: 95 x 165 x 89 mm Baseline: 7.5 cm | MARINESITU_C3_BR-105923 (.zip) | |
[Retired] Analog Low-Light Camera Sony Super HAD ICX810 / ICX811 | Field of View: 128° (H) x 96° (V) Focal Length: 2.1 mm | Format: 1/3" Pixel Size: 5.0µm (H) x 7.4µm (V-NTSC) 6.25µm (V-PAL) Minimum Illumination: 0.0003 lux | Standard: 700 TVL Formats: NTSC or PAL | N/A | Supply Voltage: 12 V Max Current: 120 mA | PCB: 38mm x 38mm Mounting holes: 34mm x 34mm (2.4mm) PCB to lens: 22mm | CAM-ANALOG-R1 (.zip) CAMTILT-P-MOUNT-ANALOG-R2 (.zip) | ICX810 / ICX811 Details (Wayback) | |
[Retired] Raspberry Pi Camera v2 w/ Wide Angle Lens | Field of View: 110° (H) Focal Length: 1.7 mm | Standards: 1080p30 | N/A | PCB: 25mm x 24.5mm Mounting Holes: 21mm x 13mm (2.2mm) PCB to lens: 23.3mm | CAM-RPI-WIDE-R1 (.zip) CAMTILT-P-MOUNT-RPI-R1 (.zip) |
Leak Sensor
Leak sensors help to detect and warn about if a leak occurs, before it gets to and damages the electronics in an enclosure.| Sensor | Electrical | Signal | Weight | 3D Models | Documents |
|---|---|---|---|---|---|
SOS Leak Sensor | Voltage: 3.3 - 5 V Max Current: 20 mA | Digital, normally LOW (leak pulls HIGH) | w/ cable and 2 probes: <10 g | SOS-ASM-LEAK-SENSOR-R1 (.zip) | SOS-LEAK-SENSOR-SCHEMATIC (.pdf) |
Sonars and Acoustic Devices
Sonars
These sonars can be used for navigation, acoustic imaging, and depth profiling. For an overview of different device types and their main applications, see our Smooth Operators Guide to Underwater Sonars and Acoustic Devices.Note: Usable sonar ranges depend on the operating conditions, including the orientation of the surface(s) being reflected off, and their relative density with the surrounding water.
| Sonars | Pressure Rating | Range | Signal Protocol(s) | Profiling? | Scanning? | Estimates Distance? | Transducer Frequency | Weight | 3D Models | Software / Libraries | Communication Protocol | Documents |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
Ping360 | 300 m | 0.75 m - 50 m Resolution: 0.08% of range | USB, Ethernet (UDP), RS485 | Yes | Variable up to 360° Resolution: 0.9° Speed: depends on interface and selected range. | No | 750 kHz | Air (w/ cable): 510 g Water (w/ cable): 175 g | PING360_SONAR_BR-100399 (.zip) PING360-M-FRAME-MOUNT-R1-PUBLIC (.zip) | Python, C++, Arduino | Ping Protocol: common, ping360 | Ping360 Firmware Files (GitHub) |
Ping Sonar | 300 m | BR-101684 RevB: 0.3 m - 100 m Resolution: 0.5% of range R3 (<May 2023): 0.5 m - 50 m | TTL Serial (UART) | Yes | No | Yes | 115 kHz | Air (w/ cable): 187 g Water (w/ cable): 100 g | PING_SONAR_BR-100725_RevA_PUBLIC (.zip) PING_MOUNT_BR-100123_RevA_PUBLIC (.zip) | Arduino ArduPilot (limited) C++ Python Rust Custom firmware | Ping Protocol: common, ping1d | Ping Sonar Firmware Files (GitHub) Original Ping Sonar Firmware Files (GitHub) Device Recovery Process (Ping Viewer docs) |
Cerulean Surveyor Multibeam Echosounder | 300 m | Maximum: 100 m Resolution: Up to 1/800th of range setting | 100Base-T Ethernet | No | Semi (requires moving device) | Yes | 240 kHz | Air: 790 g Water: 145 g | CERULEAN_SURVEYOR_240-16_BR-103522 (.zip) SURVEYOR_240-16_MOUNTING_BRACKET_BR-103523 (.zip) | API docs | ||
Water Linked DVL-A50 / DVL-A125 | 300 m / 600 m | Altitude: 0.05 m - 50 m / 0.05 m - 125 m Velocity: ≤ 3.75 m/s / ≤ 9 m/s Resolution: 0.1 mm/s Long Term Accuracy: ±1.01 % | Ethernet Serial UART (115200 baud, 3.3 V) | No | No | Yes | 1 MHz / 420 kHz | Air (w/ cable): 170 g / 750 g Water (w/ cable): 105 g / 750 g | DVL_A50_BR-101756 (.zip) DVL_A125_BR-102656 (.zip) | BlueOS Extension | Water Linked API and PD6 | DVL A50 Datasheet DVL A125 Datasheet |
Sonoptix ECHO Multibeam Imaging Sonar | 350 m | Minimum: 0.2 m Maximum: 200 m @ 400 kHz 1 30 m @ 700 kHz Resolution: 8 mm | Ethernet | Yes | No (full image capture) Horizontal View Angle: 90° @ 400 kHz 120° @ 700 kHz Maximum Update Rate: 25 Hz: | No | 400 kHz (>30 m) 700 kHz (<30 m) | Air: 750 g | SONOPTIX-ECHO-PUBLIC (.zip) | - | Video Raw data1 | Datasheet (.pdf) User Manual (March 2023) (.pdf) SDK/API Integration Guide v1 (.pdf) Firmware UpdatesSonoptix.com |
Cerulean Omniscan 450 Side Scan Sonar | Oversized M10 to M14 | Maximum: 150 m Resolution: Up to 1/1200 of range setting | Ethernet | Yes | Semi (requires moving device) | No | 450 kHz | OMNISCAN_450_SS_BR-102105 (.zip) | Programming API | |||
Cerulean Omniscan 450 FS Imaging Sonar | 100 m | Maximum: 120 m Resolution: Up to 1/1200 of range setting | 100Base-T Ethernet | Yes | Semi (requires moving device) | No | 450 kHz | CERULEAN_OMNISCAN_450FS_BR-103513-100 (.zip) OMNISCAN_450FS_MOUNTING_BRACKET_BR-103535 (.zip) | Programming API |
Cables, Penetrators, and Connectors
Cables and Tethers
These sub-sea cables and tethers provide water-proof electrical connections for communications and power. Cables with water-blocking fillers are resistant to leaks caused by damage to their outer jacket.| Cable Type | Number of Conductors | Conductor Gauge | Diameter | Compatible WetLink Penetrator | Static Minimum Bend Radius | Buoyancy in Freshwater | Weight in Air | Strength | Voltage Rating | Outer Jacket | Filler | Conductor Insulation | Wrap |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Fathom Slim ROV Tether | 2 (1x UTP) | 26 AWG | 4.0 mm | M06-4.5mm-HC M10-4.5mm-HC | 25 mm | Neutral | 0.012 kg/m | Working: 35 kgf Breaking: 155 kgf | 300 VDC | High Visibility Polyurethane Foam | Kevlar Fiber with Waterblock | Polyethylene | - |
Fathom ROV Tether | 8 (4x UTP) | 26 AWG | 7.6 mm | M10-7.5mm-HC | 75 mm | Neutral | 0.043 kg/m | Working: 35 kgf Breaking: 155 kgf | > 500 MΩ/kft | High Visibility Polyurethane Foam | Dacron Filler Fiber with Waterblock + Kevlar Strength Fiber with Waterblock | Polypropylene | - |
High-Power Tether Cable for OTPS | 10 (2x UTP, 1x UTP, 2x UTP) | 23 AWG 24 AWG 26 AWG | 9.8 mm | 75 mm | Neutral | 0.077 kg/m | Working: 160 kgf Breaking: 225 kgf | 600 VDC | High Visibility Polyurethane | Polyurethane Foam inner jacket + Dacron Filler Fiber with Waterblock + Kevlar Strength Fiber with Waterblock | ? | - | |
High Power Cable | 2 | 12 AWG | 8.3 mm | M10-8.5mm-LC | 26 mm | High-temperature Pressure-extruded polyurethane | - | FEP | PTFE tape | ||||
T500 Cable | 3 | 12 AWG | 9.0 mm | M14-9.5mm-HC | 30 mm | High-temperature Pressure-extruded polyurethane | - | FEP | Nonwoven fabric | ||||
T200 Cable | 3 | 16 AWG | 6.4 mm | M10-6.5mm-LC | 18 mm | High-temperature Pressure-extruded polyurethane | - | FEP | PTFE tape | ||||
| [end of life] (Old) Thruster Cable  | 3 | 18 AWG | 6.3 mm | High-temperature Pressure-extruded polyurethane | - | Chemically-Etched Teflon (FEP) | Teflon tape | ||||||
Ping360 Cable | 6 | 26 AWG | 5.5 mm | M10-5.5MM-LC | 20 mm | High-temperature Pressure-extruded polyurethane | - | FEP | PTFE tape | ||||
Ping Cable | 4 | 24 AWG | 4.5 mm | M06-4.5mm-LC M10-4.5mm-LC | 15 mm | Pressure-extruded polyurethane | - | Polypropylene | - | ||||
Lumen/Gripper Cable | 3 | 22 AWG | 4.5 mm | M06-4.5mm-LC M10-4.5mm-LC | 15 mm | Pressure-extruded polyurethane | - | Polypropylene | - | ||||
Ethernet and Power Cable | 2 x 22 AWG 8 x 26 AWG (2x single, 4x UTP) | 22 AWG 26 AWG (UTP) | 7.5 mm | M10-7.5mm-LC | 24 mm | Pressure-extruded polyurethane | String | Polypropylene (22 AWG) FEP (UTP) | 2-layer non-woven wrap |
Connectors
These connectors are part of our Blue Robotics Connector Standard, and form robust and reliable connections between devices, cables, and enclosures.| Component | Wires | Electrical Rating | Ingress Protection | Models | Documents |
|---|---|---|---|---|---|
Binder 770 Plug Binder 770 Bulkhead Connector  | 8 (4x twisted pairs) | Voltage: 175 V Current (per pin): 2 A | IP67 | BINDER-770-PLUG-S-R1 (2.5-4 mm) (.stp) BINDER-770-PLUG-L-R1 (6-8 mm) (.stp) | Binder 770 Plug S - 2.5-4 mm (Binder USA) Binder 770 Plug L - 6-8 mm (Binder USA) Binder 770 Bulkhead (Binder USA) |
QS8-S Connector Set | 2 (≤ 6 AWG) | Voltage: 600 VDC Max Current: Continuous: 110 A Peak (10s): 300 A | - |
Penetrators
These sub-sea penetrators are great for long term penetrations and connections of cables to and between enclosures and devices. They are flexible, suitable for a variety of applications, and lower cost and easier to install than equivalent connectors.| Component | Maximum Depth | Supports | Models | Documents |
|---|---|---|---|---|
WetLink Penetrator | ¹1000 m | 3.7mm–9.8mm electrical cables | WLP-M06-4.5MM-R1 (.zip) WLP-M10-4.5MM-R1 (.zip) WLP-M10-5.5MM-R1 (.zip) WLP-M10-6.5MM-R1 (.zip) WLP-M10-7.5MM-R1 (.zip) WLP-M10-8.5MM-R1 (.zip) WLP-M14-9.5MM-R1 (.zip) WL-M06-NUT-R1 (.zip) WL-M10-NUT-R1 (.zip) WL-M14-NUT-R1 (.zip) | |
WetLink Penetrator JPT | ²up to 950 m | 3.7mm-6.7mm cables/tubes | WLP_JPT_M10_4.5MM_BR-107163-X45 (.zip) WLP_JPT_M10_5.5MM_BR-107163-X55 (.zip) WLP_JPT_M10_6.5MM_BR-107163-X65 (.zip) WL-M10-NUT-R1 (.zip) | |
WetLink Penetrator Blank (No Hole) | ³1000 m | M6 / M10 / M14 holes | WL-M06-BLANK-PUBLIC (.zip) WL-M06-NUT-R1 (.zip) WL-M10-BLANK-PUBLIC (.zip) WL-M10-NUT-R1 (.zip) WL-M14-BLANK-R1 (.zip) WL-M14-NUT-R1 (.zip) | |
WetLink Bulkhead Adapters | ³1000 m | M06 in M10 hole M10 in M14 hole | M06_TO_M10_BULKHEAD_ADAPTER_BR-102851 (.zip) M10_TO_M14_BULKHEAD_ADAPTER_BR-102909 (.zip) M10_TO_M14_OVERSIZED_BULKHEAD_ADAPTER_BR-102910 (.zip) | |
Pressure Relief Valve | ³1000 m | - automatic pressure venting at 0.8 ± 0.2 bar - manual pressure venting - vacuum testing - backfilling (with adapter) | PRV-M10-ASM-R1 (.zip) PRV-M10-BACKFILL-ADAPTER-R1 (.zip) | |
M10 Enclosure Vent and Plug | ³1000 m | - manual pressure venting - vacuum testing | VENT-M10-R1 (.zip) VENT-M10-PLUG-R1 (.zip) | |
Switch | ³1000 m | - 120 VAC / 26 VDC - 5A | SWITCH-M10-5A-R1 (.zip) | 30-3UL Datasheet (pdf) |
Potted Cable Penetrator | ¹variable (~100 m+) | 4mm-8mm electrical cables | PENETRATOR-M-BOLT-4MM-6-8-R3 (.zip) PENETRATOR-M-BOLT-5MM-3ID-10-25-R1 (.zip) PENETRATOR-M-BOLT-5MM-10-25-R2 (.zip) PENETRATOR-M-BOLT-6MM-10-25-R2 (.zip) PENETRATOR-M-BOLT-8MM-10-25-R1 (.zip) PENETRATOR-M-NUT-10-16-R1 (.zip) PENETRATOR-M-NUT-10-8-R2 (.zip) | |
| [End of Life] Penetrator Blank (No Hole)  | ³950 m | M6 / M10 holes | PENETRATOR-M-BLANK-6-8-R3 (.zip) PENETRATOR-M-BLANK-10-25-R3 (.zip) PENETRATOR-M-NUT-10-8-R2 (.zip) | |
| ¹ Penetrator tested depths are for reference only, performance may vary depending on application and cable construction, it is the responsibility of the customer to determine suitability for their application. ² Performance beyond 100 m depends on cable properties and operating conditions. Cable extrusion may occur at higher pressures. ³ Rated depth in sea water |
||||
Tether Management
This equipment helps to reduce tether strain and tangling.| Component | Weight | Main Materials | 3D Models / Documents |
|---|---|---|---|
Fathom Spool | Standard: 2.22 kg Large: 2.89 kg | - Black HDPE (frame) - Blue+black anodized aluminum (frame + crank) - Nylon (brakescrews + cable clamps) | TMS-ASM-KIT-M-R2 (Standard Size) (.zip) TMS-ASM-KIT-L-R2 (Large Size) (.zip) TMS-SPOOL-CONNECTOR-GUARD-R1 (.zip) |
High-Power Tether Reel for OTPS | RL-500: 13.6 kg RL-750: 16.3 kg | - Black polypropylene copolymer (case) | OUTLAND_TECHNOLOGY_RL-500_BR-105531 (.zip) OUTLAND_TECHNOLOGY_RL-750_BR-106182 (.zip) |
Connector Guard | 38 g | Blue anodized 6061 aluminum | |
Tether Cable Thimble | Black Nylon | ||
Slip Ring | - Black plastic (housing) - UL Teflon @ AWG30 (wires) - Gold (contacts - 2A per circuit) | SLIP-RING-SNM012A-08-DATASHEET (.pdf) |
O-Rings, Screws, Tools, and Consumables
O-Rings and Seals
These o-rings, x-rings, and seals help to prevent water ingress through enclosure openings.For custom designs, the Parker O-ring Handbook is the industry standard reference manual.
| Seal | Size | Products | Material |
|---|---|---|---|
WetLink Penetrator Spare Seals | Varied | - WetLink Penetrators | Fluoro-Elastomer (FKM) Rubber |
| O-Ring M10 Vent Plug | 2 x 6 mm | - [end of life] M10 Vent Plug | Nitrile Rubber (Buna-N 70A) |
| O-Ring WetLink M06 | 1.5 x 7 mm | - M06 WetLink Penetrator - M06 WLP Blank - Ping Sonar - Ping360 Scanning Sonar - DWE Camera | Nitrile Rubber (Buna-N 70A) |
| O-Ring Potted M6 | AS568-010 | - M6 Potted Penetrator - M6 Blank | Nitrile Rubber (Buna-N 70A) |
| O-Ring M10 WetLink Plugs | 1.5 x 11.5 mm | - M10 Vent Plug - Switch (Plug) - Vacuum Plug - Pressure Relief Valve (Plug) | Nitrile Rubber (Buna-N 70A) |
| O-Ring M10 Backfill Adapter | 1 x 13.5 mm | - Backfill Adapter | Nitrile Rubber (Buna-N 70A) |
| O-Ring WetLink M10 Bulkhead | AS568-013 | - M10 WetLink Penetrator - M10 WLP Blank - WLP JPT - M06 to M10 Bulkhead Adapter - M10 Vent (Bulkhead) - Switch (Bulkhead) - Pressure Relief Valve (Bulkhead) - M10 Potted Penetrator - M10 Blank - Bar 02 / Bar 30 - Bar XT range / [retired] Bar 100 - Celsius - Subsea LED Indicator - Subsea RGB LED Indicator - MarineSitu C3 Stereo Camera - Water Linked DVL A50/A125 - Cerulean Omniscan 450 (SS/FS) - Cerulean Surveyor - Sonoptix ECHO | Nitrile Rubber (Buna-N 70A) |
| O-Ring WetLink M14 | 1.5 x 15 mm | - M14 WetLink Penetrator - M14 WLP Blank - M10 to M14 Bulkhead Adapter - M500 Motor | Nitrile Rubber (Buna-N 70A) |
| O-Ring Lumen Face | AS568-019 | - Lumen (Face) | Nitrile Rubber (Buna-N 70A) |
| X-Ring Ping Sonar | AS568-127 | - [R1-R3] Ping Sonar | Nitrile Rubber (Buna-N 70A) |
| O-Ring Gripper/Lumen | AS568-021 | - Newton Gripper (Flange Cap) - Lumen (Radial) | Nitrile Rubber (Buna-N 70A) |
| X-Ring Gripper Jaw | AS568-204 | - Newton Gripper (Jaw Side) | Nitrile Rubber (Buna-N 70A) |
| O-Ring WetLink M14 Oversized | AS568-117 | - Oversized M10 to M14 Bulkhead Adapter for BlueBoat - M200 Motor (BlueBoat) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 2" Locking Flange Face | AS568-030 | - 2" Locking Enclosure Flange (Face) - Ping2 Sonar - [retired] (non-locking) 2" Enclosure Flange (Face) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 2" Locking Flange Radial | AS568-031 | - 2" Locking Enclosure Flange (Radial) - 2" Coupler Flange | Nitrile Rubber (Buna-N 70A) |
| O-Ring WetLink Cable Splice Kit (Tiny Box) | 1.5 x 44 mm | - WetLink Cable Splice Kit | Nitrile Rubber (Buna-N 70A) |
| O-Ring 2" Flange Radial | AS568-133 | - [retired] (non-locking) 2" Enclosure Flange (Radial) | Nitrile Rubber (Buna-N 70A) |
| O-Ring Ping360 | AS568-142 | - Ping360 | Nitrile Rubber (Buna-N 70A) |
| O-Ring 3" Flange Face | AS568-148 | - 3" Locking Enclosure Flange (Face) - [end of life] (non-locking) 3" Enclosure Flange (Face) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 3" Locking Flange Radial | AS568-150 | - 3" Locking Enclosure Flange (Radial) - 3" Coupler Flange | Nitrile Rubber (Buna-N 70A) |
| O-Ring 3" Flange Radial | AS568-230 | - [end of life] (non-locking) 3" Enclosure Flange (Radial) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 4" Locking Flange | AS568-154 | - 4" Locking Enclosure Flange (Face & Radial) - 4" Coupler Flange - [retired] (non-locking) 4" Enclosure Flange (Face) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 4" Flange Radial | AS568-238 | - [retired] (non-locking) 4" Enclosure Flange (Radial) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 5" Flange Face | AS568-157 | - 5" Locking Enclosure Flange (Face) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 5" Flange Radial | AS568-248 | - 5" Locking Enclosure Flange (Radial) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 6" Flange Face | AS568-162 | - 6" Locking Enclosure Flange (Face) - (non-locking) 6" Enclosure Flange (Face) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 6" Flange Radial | AS568-432 | - (non-locking) 6" Enclosure Flange (Radial) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 1L Watertight Box | AS568-253 | - 1L Watertight Box | Nitrile Rubber (Buna-N 70A) |
| O-Ring 6" Locking Flange Radial | AS568-255 | - 6" Locking Enclosure Flange (Radial) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 8" Flange Face | AS568-170 | - 8" Locking Enclosure Flange (Face) - (non-locking) 8" Enclosure Flange (Face) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 8" Flange Radial | AS568-442 | - 8" Enclosure Flange (Radial) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 8" Locking Flange Radial | AS568-265 | - 8" Locking Enclosure Flange (Radial) | Nitrile Rubber (Buna-N 70A) |
| O-Ring 5L Watertight Box | AS568-277 | - 5L Watertight Box | Nitrile Rubber (Buna-N 70A) |
BlueBoat Hatch O-Ring | 6.35 x 325 mm | - BlueBoat Port Hatch Lid Assembly - BlueBoat Starboard Hatch Lid Assembly - BlueBoat Hatch Base | Neoprene 30A |
Screws
To find replacement screws for Blue Robotics products, please refer to this guide.
Tools
These tools are useful for assembly, maintenance, and repairs.| Tool | Purpose | Material | Weight | 3D Models |
|---|---|---|---|---|
| WetLink Cable Splice Kit | Connect two cables in minutes without potting or sealant, or an M10 sensor with a small PCB. Depth rated to 500 m. | Glass-filled polycarbonate | 64 g | WetLink-Cable-Splice-Kit-BR-101170 (.zip) |
Cable Jacket Stripper | Cutting and stripping 4.5 mm–29 mm cable jackets. | |||
WetLink Penetrator Assembly Block | Holds WLP bulkhead during assembly. Fits M06, M10, and M14 bulkheads. | 6061-T6 Aluminum, type III anodized | WLP-ASSEMBLY-BLOCK-R1 (.zip) | |
WetLink Bulkhead Wrench | Tightening cable penetrators and bulkheads close together. M06 / M10 / M14 sizes. | Chrome-plated steel hardened to HRC 32-36 | WL-M06-BULKHEAD-WRENCH-R1 (.zip) WL-M10-BULKHEAD-WRENCH-R1 (.zip) WL-M14-BULKHEAD-WRENCH-R1 (.zip) |
|
WetLink Penetrator Plug Wrench | Tightening or removing WLP Plugs. Sizes for WLP Plugs. | Chrome-plated steel hardened to HRC 32-36 | ||
| [End of Life] Bulkhead Wrench (R1 Style)  | Tightening cable penetrators and bulkheads close together. M10 only. | Chrome-plated steel | ||
Backfill Adapter | Filling enclosures with inert gas, or sealing an enclosure while maintaining vacuum. Requires Pressure Relief Valve. | 7075-T6 Anodized Aluminum | 4.5 g | PRV-M10-BACKFILL-ADAPTER-R1 (.zip) |
Vacuum Plug | Pulling an enclosure to vacuum. Requires M10 Vent or Backfill Adapter. | 7075-T6 Anodized Aluminum | 8 g | VENT-M10-VACUUM-PLUG-R1 (.zip) |
Vacuum Pump | Testing enclosure seals without getting wet. | PVC | ||
Enclosure Pry Tool | Opening watertight enclosures. | Glass-filled nylon | ||
O-Ring Pick | Removing o-rings without damage. | Nylon | ||
Hex Key Set | Tightening or removing hex screws. 1.5mm, 2mm, 2.5mm, and 3mm. | Blue-coated Steel | ||
| [End of Life] Potting Cartridge Dispenser  | Simplifies dispensing 2-part cartridges with a mixing nozzle. | |||
IDC Hand Tool | Inserting wires into an insulation displacement connector (used in the Lumen Light and Newton Gripper). | |||
IDC Tool Bit | Inserting wires into an insulation displacement connector (used in the Lumen Light and Newton Gripper). |
Consumables
These consumables help to create and maintain watertight seals of enclosures, cables, and penetrators.| Product | Purpose | Material | Documents |
|---|---|---|---|
Desiccant Bags | Indicating and absorbing moisture in an enclosure. | Silica gel beads + cobalt chloride indicator | |
Tef-Gel Anti-Corrosion Lubricant | Protecting against galvanic corrosion, seizing, and galling. | Tef-Gel (40% PTFE) | Tef-Gel MSDS (pdf) |
Molykote 111 | Lubricating o-rings and other seals. | Silicone grease | Molykote 111 Compound Technical Data Sheet (.pdf) Molykote 111 Compound MSDS (.pdf) |
| [Retired] Silicone Grease  | Lubricating o-rings and other seals. | Silicone grease | 202003-silicone-grease-MSDS (.pdf) |
Loctite Marine Epoxy (USA ONLY) | Waterproof potting and sealing. | Epoxy resin + hardener | |
| [Retired] Thixotropic Potting Compound  | Waterproof potting. | Reltek B-45TH | BlueRobotics-WL-Epoxy-PartA-MSDS (.pdf) BlueRobotics-WL-Epoxy-PartB-MSDS (.pdf) |
Potting Kit (x 10) | Simplifies mixing and applying epoxy | Syringes + mixing cups + mixing tips | |
| [Retired] Mixing Tips (10 pcs)  | Applying potting compound. | ||
| [End of Life] Cable Preparation Wipes  | Cleaning and preparing cable jackets and parts for potting and other adhesives. | Acetone-soaked fabric | |
Moldable Sealant | Field repairing cables and connections. | Cured rubber | coax-seal-msds (.pdf) |
Silicone Self-bonding Tape | Air and moisture sealing of irregular shapes. | Silicone | Datasheet (X-treme Tape) |
Underwater Robotics: Science, Design & Fabrication | Learning about the marine environment and marine robotics design and fabrication. | Paper |
Communication, Control, and Power
Power Supplies, Batteries, and Chargers
These power supplies, batteries, and chargers help keep a vehicle powered and ready to use.| Component | Purpose | Battery Cells | Output Capacity | Charging / Input Power | Battery Chemistry | Weight | 3D Models | Documents |
|---|---|---|---|---|---|---|---|---|
Black Rectangular Battery | Powering vehicle. | 4S1P | Nominal Voltage: 14.8V Nominal Capacity: 10Ah Max Current: Continuous: 90A (9C) Burst (10s): 120A (12C) | Max Current: 15A Recommended Current: 10A | Lithium Polymer | 750 g | BATTERY-LP-4S-10AH-R1 (.zip) | Battery MSDS (.pdf) UN38.3 Test Report (.pdf) Certificate of Conformity (.pdf) |
White Cylindrical Battery | Powering vehicle. | 4S6P | Nominal Voltage: 14.8 V Nominal Capacity: 15.6 Ah Max Current: Continuous: 60 A (3.8C) Burst (10s): 132 A (8.5C) | Max Current: 20 A Recommended Current: 10 A | Lithium-ion | 75 ±5 mm | Same CAD model as original 18Ah version: BATTERY-LI-4S-18AH-R1 (.zip) | Battery MSDS (.pdf) UN38.3 Test Report (.pdf) INR18650-P26A MSDS (.pdf) INR18650-P26A Data Sheet (.pdf) |
Black Cylindrical Battery | Powering vehicle. | 4S6P | Nominal Voltage: 14.8V Nominal Capacity: 18.0Ah Max Current: Continuous: 60A (3.3C) Burst (10s): 132A (7.3C) | Max Current: 20A | Lithium-ion | 75 ±5 mm | BATTERY-LI-4S-18AH-R1 (.zip) | Battery MSDS (.pdf) UN38.3 Test Report (.pdf) INR18650-30Q Data Sheet (.pdf) |
Mega Battery | Powering vehicle. | 28.0 Ah | Nominal Voltage: 22.2 V Nominal Capacity: 25.2 V Max Current: Continuous: 6S7P (#colspan#) Burst (10s): 110 A (3.9 C) | Max Current: 240 A Recommended Current: 32 A | Lithium-ion | 85 mm | BATTERY-LI-6S-28AH-ADAPTED-R1 (.zip) | Battery MSDS (.pdf) UN38.3 Test Report (.pdf) CE Certificate of Compliance (.pdf) |
Outland Technology Power Supply | Powering vehicle from topside. | - | Nominal Voltage: 15VDC Max Power: 1000W (66.8A) | Input Voltage: 100-240VAC 50/60Hz Max Usage: 1800W | - | Limited Warranty (.pdf) | ||
5V Regulator | Powering 5V electronics in vehicle. | - | Nominal Voltage: 5 V Max Power: 30 W (6 A) | 7 - 26 V / 2S-6S Li-po/Li-ion Battery | - | |||
| [Retired] 5V Regulator  | Powering 5V electronics in vehicle. | - | Nominal Voltage: 5 V Max Power: 15 W (3 A) | 2-6S | - | |||
BlueBoat Fuse Spares | Protecting batteries by limiting maximum current. | - | 50 A MIDI | - | - | |||
Power Sense Module | Measuring current usage and supply voltage. | - | - | Measures up to 25.2 V (6S) 100 A (non-continuous) | - | PSM-ELEC-PCB-R2 (.pdf) | ||
Battery Cell Checker | Checking battery cell voltages. | 2-7s (lithium) | - | - | Lithium Ion LiPo LiFE NiMH NiCd | 42 g | ||
H6 Pro Charger | Charging batteries. | Lithium: 4S, 6S (Lithium: 1-6S NiZn/NiCd/NiMH: 1-14S Pb: 2-24V) | Charge Power: 168 W (10 A)* (0.1-26 A) Discharge Power: Internal Discharge 30W, Balance Port 10W, (700 W External) (0.1-5 A) | 100–240V AC / 6.5–30V DC | LiPo LiIo (LiFe LiHV NiZn NiCd NiMH Pb) | 410 g | H6-PRO-Quick-Start-English-Spanish (.pdf) HOTA H6 PRO Full Manual (for advanced users with unlocked firmware ONLY, English) (.pdf) Certificate of Conformity (.pdf) |
|
| [Retired] Battery Charger  | Charging batteries. | Lithium: 1-6S NiCd/NiMH: 1-17S Lead-acid: 2-24V | Charge Power: 300W (0.05-20A) Discharge Power: 20W Internal, 300W External (0.05-20A) | 100-240V AC / 10-28V DC | LiPo LiIo LiFe LiHV NiCd NiMH Pb | 1075 g | 300W 20A Balance Charger Manual from Turnigy (.pdf) |
Interface Electronics
These interface boards and adapters help ensure communications are possible between a range of sensors and devices.| Component | Used For | From | To | 3D Models | Documents |
|---|---|---|---|---|---|
BlueBoat BaseStation | Wifi radio access point for connecting to one or more BlueBoats. | wifi / USB-C | long range wifi | BASESTATION_BR-101669 (.zip) | |
Wireless Router | 2.4 GHz wifi router for BlueBoat and BaseStation. | 2.4 GHz wifi | N-type antenna connector | Mikrotik_programming (.zip) | |
BlueBoat Cellular Modem Kit | 4G global cellular modem kit for BlueBoat. | USB-C | 4G LTE cellular networks | BLUEBOAT_CELLULAR_MODEM_BR-103376 (.zip) | Quectel Modem Datasheet Hologram SIM Datasheet AT Commands Manual |
BlueBoat Antennas | Omnidirectional antenna for a 2.4 GHz wifi router OR a 600-2700 MHz 4G cellular modem. | N-type connector | omnidirectional long range wifi OR global 4G cellular | ||
BaseStation Directional Antenna Kit | Directional antenna options for a 2.4 GHz wifi router. | N-type connector | directional long range wifi | PANEL_ANTENNA_BR-103224 (.zip) YAGI_ANTENNA_BR-103223 (.zip) | |
Fathom-X Tether Interface Board | Extending ethernet communications over two wires (e.g. for a tether). | Ethernet (RJ45) | HomePlug AV (two wires) | FATHOM-X-ASM-R1 (.zip) | Fathom-X-Schematic (.pdf) Fathom-X Design Files LX200V20-Datasheet-v1.2 (.pdf) LX200V20 (RAKwireless) |
| [Retired] Fathom-S  | Analog video. Long distance RS-422 serial communication. Arduino Programming. | NTSC/PAL analog video RS-422 serial | NTSC/PAL analog video RS-422 serial | FATHOM-S-ASM-TOPSIDE-R1 (.zip) FATHOM-S-ASM-ROV-BOARD-R1 (.zip) | Fathom-S-Schematic-1 (.pdf) Fathom-S Design Files |
Ethernet Switch | Connecting up to 5 ethernet devices to a local network. | Ethernet (RJ45) | Ethernet (RJ45 / 4-pin JST-GH) | ETHERNET_SWITCH_BR-100457_RevC (.zip) | |
RJ45 to JST GH Adapter | Converting ethernet cable connectors. | Ethernet (RJ45) | Ethernet (4-pin JST-GH) | ||
JST GH Extension Cables | Extending 4 and 6 wire JST-GH connections. | 4-pin JST-GH / 6-pin JST-GH | 4-pin JST-GH / 6-pin JST-GH | ||
BLUART Adapter | Interfacing a serial signal with a USB port. | - TTL Serial (6-pin JST-GH / through holes) - RS485 (4-pin JST-GH / through holes) | USB (micro-USB) | BLUART-R1-Schematic (.pdf) | |
I2C Level Converter | Interfacing I2C devices with different voltages. | 5V I2C (4-pin header) | 3.3V I2C (4-pin JST-GH / DF13 / pin header) | LEVEL-CONVERTER-ASM-R1 (.zip) | I2C-Level-Converter-Schematic (.pdf) Level Converter Design Files |
I2C Bus Splitter | Connecting up to 9 I2C devices to a shared bus. | I2C (4-pin JST-GH / DF13) | I2C (4-pin JST-GH / DF13 / through holes) | ||
JST GH to DF13 Adapter, 4-pin | Converting a 4 wire cable connector (e.g. for I2C). | 4-pin JST-GH | 4-pin DF13 | ||
Terminal Blocks and Hardware | Power / ground bus (1) and thruster connections (2) on electronics tray. | 1. ESC output (wire / ferrule) 2. Power wire (spade terminal) | 1. Thruster wire 2. Power wire (spade terminal) | Barrier Block Datasheet (Molex) Eurostyle Terminal Strip Datasheet (Molex) |
|
128 GB BlueOS MicroSD Card | Convenient setup of a BlueOS-based vehicle. | Data storage, configured with - ArduSub (for BlueROV2) / - ArduRover (for BlueBoat) | Raspberry Pi 3B/3B+/4B (with Navigator flight controller board |
Flight Controller Boards
The autopilot board/flight controller board processes the pilot input and sensor data, and controls the motors, lights, servos, and relays on the vehicle.| Flight Controller | Electrical | ArduPilot Firmwares | Onboard Sensors | Interfaces | Physical | 3D Models | Documents |
|---|---|---|---|---|---|---|---|
Thruster Commander | Supply Voltage: 7 - 20 V | N/A | N/A | 2x analog inputs for speed/direction or left/right control 4x PWM outputs (2 paired channels) | CMDR-ASM-POTENTIOMETER-R1 (.zip) CMDR-ASM-THRUSTER-COMMANDER-R1 (.zip) | ||
Navigator | Supply Voltage: 5–5.35 V (Main input) 5–5.35 V (Power module connector) 5–5.35 V (Aux input) Consumption: 5 mA (Idle) 150 mA (Typical) 200 mA (Max) | Sub >= 4.1.0 Rover >= 4.2.3 Copter >= 4.2.3 Plane >= 4.2.3 | Accel / Gyro: #colspan# (6-axis) Magnetometer: ICM-20602 Compass: MMC5983 Barometer: AK09915 ADC: BMP280 / BMP390 Software Libraries: SBUS, Crossfire, IBUS (inverted/non-inverted serial receivers) | JST-GH connectors Serial inverter for RC receivers 3.3 V to 5 V translation for RGB neopixel LEDs 4KB EEPROM | Weight: -40°C to 85°C Dimensions: 26 g | NAVIGATOR-PCB-R1 (.zip) NAVIGATOR-STACK (.zip) | NAVIGATOR-PCB-SCHEMATIC (.pdf) All sensor and IC datasheets are linked in technical details. |
| [End of Life] Pixhawk  | Supply Voltage: 4.8 - 5.4 V | Any | Gyro: L3GD20H (16 bit) Accel / Mag: LSM303D (14 bit) Accel / Gyro: MPU 6000 (3-axis) Barometer: MS5611 | DF13 connectors 1x I2C 1x CAN (2x optional) 2x ADC (3.3 V) 1x ADC (6.6 V) 4x UART (2x with flow control) 1x Console 8x PWM with manual override 6x PWM / GPIO / PWM input 1x S.BUS / PPM / Spektrum input 1x S.BUS output | Weight: 38 g Dimensions: 50x81.5x15.5 mm | Pixhawk 1 Flight Controller Specifications (Dronecode) Schematic and Layout (.pdf) |
|
Pixhawk 4 | Supply Voltage: 4.1 - 5.7 V | Sub >= 4.1.0 Rover >= 3.4.2 Copter >= 3.6.1 Plane >= 3.9.3 | Accel / Gyro: ICM-20689 Accel / Gyro: BMI055 or ICM20602 Magnetometer: IST8310 Barometer: MS5611 | JST-GH connectors 8-16x PWM outputs 3x PWM/Capture inputs 1x R/C input for CPPM 1x R/C input for Spektrum / DSM and S.Bus with analog / PWM RSSI input 1x S.Bus servo output 5x UART 3x I2C 4x SPI 2x CAN 2x inputs for battery voltage / current | Weight: 15.8 g Dimensions: 44x84x12 mm | Pixhawk 4 Flight Controller Specifications (Dronecode) |
Onboard Computers
An onboard computer can simplify and enable communications between the surface computer, the vehicle's flight controller board, and any sensors (e.g. cameras, sonars, etc), indicators, or actuators that may be challenging or undesirable to connect via a flight controller.It can be a companion to an independent flight controller board (e.g. Pixhawk) or the base for a dependent board (e.g. Navigator).
| Computer | Electrical | Main Features | Documents |
|---|---|---|---|
Raspberry Pi 4 2GB | Supply Voltage: 5 V Operating Voltage: 3.3 V Max Current: 3 A | - Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz - 2.4 GHz and 5.0 GHz IEEE 802.11ac wireless, Bluetooth 5.0, BLE - Gigabit Ethernet - 2 USB 3.0 ports; 2 USB 2.0 ports - 2GB RAM (1/4/8GB models available) - 2-lane MIPI CSI camera port - 40 GPIO pins - H.265 (4kp60 decode), H264 (1080p60 decode, 1080p30 encode) - Micro-SD card slot for loading operating system and data storage - Operating temperature: 0 – 50 degrees C ambient | Specifications Schematics and Drawings |
| [Retired] Raspberry Pi 3B  | Supply Voltage: 5 V Operating Voltage: 3.3 V Max Current: 2.5 A | - Quad Core 1.2GHz Broadcom BCM2837 64bit CPU - BCM43438 wireless LAN and Bluetooth Low Energy (BLE) on board - 100 Base Ethernet - 4 USB 2 ports - 1GB RAM - CSI camera port for connecting a Raspberry Pi camera - 40-pin extended GPIO - Micro SD port for loading your operating system and storing data | Schematics and Drawings |
Software and Firmware
Software Applications
We develop or contribute to these softwares. They can be used to operate/configure our equipment/products.| Application | Recommended Version(s) | Installation | Runs On | Major Functionalities | Code Repository | Documentation Links |
|---|---|---|---|---|---|---|
| BlueOS [Replaces Companion Software] |   | BlueOS Installation | Onboard Computer (Raspberry Pi 3B, Raspberry Pi 4B, +more to come) | - relays communication between the autopilot board and control software - allows USB connection forwarding, including Ping devices and multiple video streams - provides a web interface for configuration and monitoring system performance and service statuses - allows users to make custom device/sensor integrations | bluerobotics/ BlueOS | - Official BlueOS Docs |
Cockpit [Replaces QGroundControl] |  | Cockpit Installation | Surface Computer (can be served by Onboard Computer) | - connects to the vehicle - allows controlling via a joystick - displays vehicle telemetry and video stream(s), and allows recording | bluerobotics/ Cockpit | - Official Cockpit Docs |
QGroundControl | BlueROV2 Software Setup | Surface Computer | - connects to the vehicle - allows controlling via a joystick - displays vehicle telemetry and a video stream, and allows recording - allows setting autopilot parameters | mavlink/ QGroundControl | - ArduSub-specific QGC Docs - Official QGC Docs |
|
Ping Viewer |  | Ping Viewer Quick Start | Surface Computer | - can display Ping Altimeter and Echosounder (Ping1D) and Ping360 Scanning Imaging Sonar outputs - allows configuring device/scanning settings - allows updating Ping1D firmware - allows replaying previous scans | bluerobotics/ ping-viewer | - Official Ping Viewer Docs |
| [End of Life] Companion Software |  | ArduSub Installing Companion | Companion Computer (Raspberry Pi 3B) | - relays communication between the autopilot board and control software - allows USB connection forwarding, including Ping devices and a video stream - provides a web interface for configuration and monitoring system performance and service statuses - allows users to make custom device/sensor integrations | bluerobotics/ companion | - ArduSub Required Software - ArduSub Companion Web Interface |
Device Firmwares
These device firmwares power our devices.| Firmware | Recommended Version(s) | Installation | Runs On | Major Functionalities | Code Repository | Documentation Links |
|---|---|---|---|---|---|---|
| ArduSub | ArduSub Firmware | Flight Controller Board (e.g. on BlueROV2) | - allows high level control of a thruster-controlled underwater vehicle - supports manual and stabilised flight modes - supports autonomous missions (with a suitable positioning sensor/estimate) - supports a variety of I2C and serial based sensors (for depth, temperature, GPS, etc) - supports servo-style PWM outputs (for lights, grippers, etc) - supports relay style (on/off) outputs - supports power/battery monitoring - supports leak detection via digital input | ArduPilot/ ardupilot | - ArduSub Documentation | |
| ArduBoat (Rover) | ArduRover Firmware | Flight Controller Board (e.g. on BlueBoat) | - allows high level control of a boat - supports manual and stabilised flight modes - supports autonomous missions - supports a variety of I2C and serial based sensors (for depth, temperature, GPS, etc) - supports servo-style PWM outputs (for lights, grippers, etc) - supports relay style (on/off) outputs - supports power/battery monitoring | ArduPilot/ ardupilot | - General ArduRover docs - Boat-specific docs |
|
| BLHeli_S | Basic ESC R3 Firmware Files and Customisation | (e.g. on BlueROV2) | - allows bi-directional control of a sensorless brushless DC motor - forward, stop, or reverse rotation depending on PWM pulse-duration (stops at 1500±25 µs) - variable rotation speed (max reverse 1100 µs, max forward 1900 µs) - built in thermal protection and stall protection - motor phase detection and ESC arming beeps - regenerative braking - also supports control via Oneshot125, Oneshot42, Multshot, Dshot150, Dshot300, and Dshot600 | bitdump/ BLHeli | BLHeli_S Version 16.x manual | |
| Brushed ESC | N/A | avrdude installer script | Newton Subsea Gripper | - allows bidirectional control of a brushed DC motor - forward, stop, or reverse rotation depending on PWM pulse duration (stops at 1500±30 µs) - automatic motor stall detection - single rotation speed | bluerobotics/ newton-firmware | - |
| Ping Sonar | Ping Viewer Firmware Update | Ping Altimeter and Echosounder | - enables sonar profiling with a variable range and ping rate - includes distance estimation algorithm with confidence measure - variable sensor gain - allows setting speed of sound - supports 'common' and 'ping1d' message subsets of Ping Protocol - serial communication, with 115200 or 9600 baudrate | bluerobotics/ ping-firmware bluerobotics/ ping-firmware-oss | - Ping Protocol: Ping1D - Ping Viewer: Ping1D |
|
| Ping360 | Ping Viewer Firmware Update | Ping360 Scanning Imaging Sonar | - enables multi-directional sonar scanning and profiling, with a variable range and ping rate - provides low-level device control including sensor gain, transmit duration, sample period, and samples per profile - supports 'common' and 'ping360' subsets of Ping Protocol - serial/USB/ethernet communication options | bluerobotics/ ping-firmware | - Ping Protocol: Ping360 - Ping Viewer: Ping360 |
|
| H6 Pro | H6 Pro Charger Firmware Unlock Guide | H6 Pro Lithium Battery Charger | Limited Firmware: - allows balancing high capacity lithium batteries, and charging to full or storage levels - supports internal discharging to storage level Full Firmware: - allows balancing and charging a variety of battery types, at custom rates and to custom levels - supports internal, external and regenerative discharging - multi-function port can test servos, measure PWM, and provide PPM signals | - | HOTA H6 PRO Full Manual |
Software Libraries and Drivers
These libraries and drivers allow interfacing our components and sensors with different devices and programming languages.| Library | Language | Communicates With | Documentation Links |
|---|---|---|---|
| ping-rs | Rust | - Ping Sonar - Ping360 | - ping-rs - Ping Protocol |
| ping-cpp | C++ | - Ping Sonar - Ping360 | - Ping Protocol |
| ping-python | Python | - Ping Sonar - Ping360 | - ping-python - Ping Protocol |
| ping-BlueOS | Python | - Ping Sonar - Ping360 | |
| ping-Arduino | C++ (Arduino) | - Ping Sonar | - Ping Arduino - Ping Protocol: Ping1D |
| ping-ArduPilot | C++ (ArduPilot) | - Ping Sonar | |
| MS5837-python | Python | - MS5837 pressure sensors - Bar30 - Bar02 | |
| MS5837-Arduino | C++ (Arduino) | - MS5837 pressure sensors - Bar30 - Bar02 | |
| MS5xxx-ArduPilot | C++ (ArduPilot) | - MS5xxx pressure sensors - Bar30 | |
| KellerLD-python | Python | - Keller LD pressure sensors - BarXT range - [retired] Bar100 | - Keller Communication Protocol 4LD-9LD |
| KellerLD-Arduino | C++ (Arduino) | - Keller LD pressure sensors - BarXT range - [retired] Bar100 | - Keller Communication Protocol 4LD-9LD |
| KellerLD-ArduPilot | C++ (ArduPilot) | - Keller LD pressure sensors - BarXT range - [retired] Bar100 | - Keller Communication Protocol 4LD-9LD |
| TSYS01-python | Python | - TSYS01 temperature sensor - Celsius | |
| TSYS01-Arduino | C++ (Arduino) | - TSYS01 temperature sensor - Celsius | |
| TSYS01-ArduPilot | C++ (ArduPilot) | - TSYS01 temperature sensor - Celsius | |
| navigator-rs | Rust | - Navigator | - navigator_rs |
| navigator-python | Python | - Navigator | - navigator-python |
| navigator-cpp | C++ | - Navigator | - navigator-cpp |
| navigator-ArduPilot | C++ (ArduPilot) | - Navigator | |
| ICM20602-python | Python | - ICM20602 IMU - Navigator | |
| Invensense-ArduPilot | C++ (ArduPilot) | - ICM20602 IMU | |
| MMC5983-python | Python | - MMC5983 magnetometer - Navigator | |
| MMC5883-python | Python | - MMC5883 magnetometer | |
| MMC5xx3-ArduPilot | C++ (ArduPilot) | - MMC5983 magnetometer | |
| AK09915-rs | Rust | - AK09915 compass - Navigator | |
| AK09915-python | Python | - AK09915 compass - Navigator | |
| AK0991x-ArduPilot | C++ (ArduPilot) | - AK09915 compass | |
| BMP280-python | Python | - BMP280 barometer - Navigator | |
| BMP280-ArduPilot | C++ (ArduPilot) | - BMP280 barometer | |
| ADS1115-python | Python | - ADS1115 ADC - Navigator | |
| ADS1115-ArduPilot | C++ (ArduPilot) | - ADS1115 ADC | |
| PCA9685-python | Python | - PCA9685 PWM driver - Navigator | |
| PCA9685-ArduPilot | C++ (ArduPilot) | - PCA9685 PWM driver | |
| NeoPixel-python | Python | - NeoPixel RGB LED | |
| NeoPixel-ArduPilot | C++ (ArduPilot) | - NeoPixel RGB LED | |
| CAT24C32-python | Python | - CAT24C32 EEPROM |
Technical Bulletins
| Technical Bulletin | Release Date | Last Updated | Current Status | Resolution? |
|---|---|---|---|---|
| 14: Aluminum Tubes (.pdf) | October 14, 2025 | April 8, 2026 | Resolved | Racking grooves removed from design |
| 13: Ping360 (.pdf) | December 6, 2024 | July 15, 2025 | Resolved | Internal design adjustment |
| 12: Camera (.pdf) | March 28, 2024 | April 29, 2024 | Resolved | New mount design |
| 11: Lumen Lens (.pdf) | November 29, 2023 | December 15, 2023 | Resolved | New lens batch |
| 10: BaseStation (.pdf) | November 28, 2023 | December 15, 2023 | Resolved | Adjust position of switch |
| 09: Camera (.pdf) | October 11, 2023 | March 28, 2024 | Resolved | Modify camera mount (per TB12) |
| 08: H6 PRO Battery Charger (.pdf) | August 28, 2023 | November 2, 2023 | Resolved | Port cover + warning label |
| 07: Ethernet Switch (.pdf) | December 5, 2022 | Resolved | Correct oscillator | |
| 06: Fathom X (.pdf) | June 30, 2022 | Resolved | Correct TVS diode | |
| 05: Lumen Lens Cracking (.pdf) | May 4, 2021 | January 7, 2022 | Resolved | Improved design - R4 |
| 04: White Bearings (.pdf) | January 22, 2020 | Resolved | ||
| 03: Potting (.pdf) | December 19, 2019 | July 08, 2020 | Resolved | |
| 02: Thruster Potting (.pdf) | March 29, 2019 | Resolved | ||
| 01: Water Linked Underwater GPS / BlueROV2 Integration Kit (.pdf) | November 11, 2018 | Resolved |
Authors

Eliot
Eliot is the Community Manager / Applications Engineer at Blue Robotics. He has a background in robotics and computer vision, and loves to help discover and share knowledge. You can find him on our forums as EliotBR.