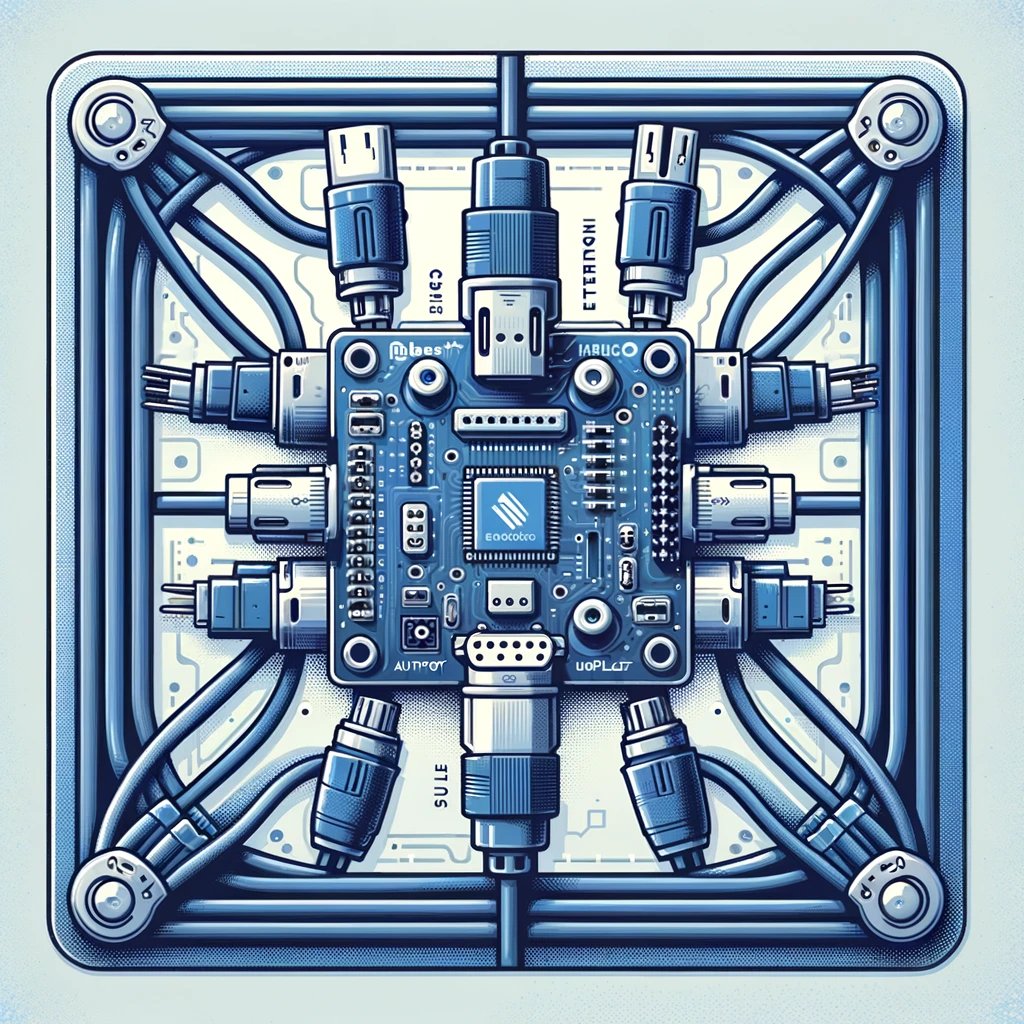
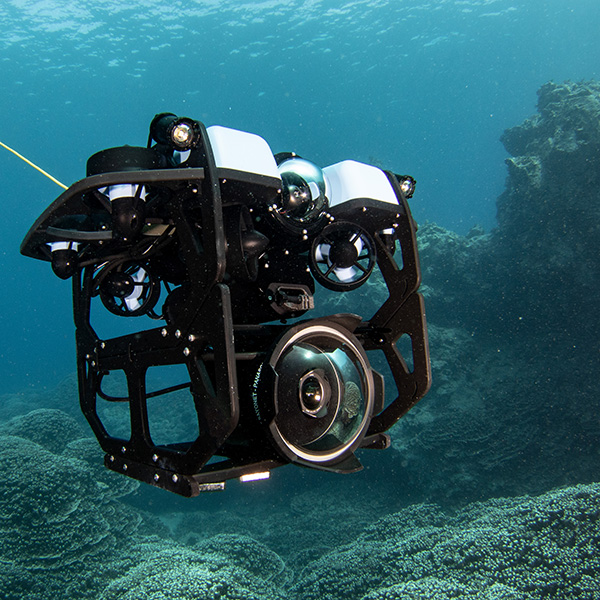
The BlueROV2 is controlled by the Navigator Flight Controller and BlueOS. The Navigator is designed and built for ROVs and other robotics applications. It has onboard sensors, including an inertial measurement unit (IMU) to measure orientation, a magnetometer to measure compass heading, and a leak sensor to alert you of any water ingress. It has 16 outputs that can be connected to thrusters, lights, grippers, and other accessories as well as plenty of serial and I2C ports to communicate with sensors and sonars. It has plenty of room for expandability!
The Navigator is coupled with a Raspberry Pi 4 computer, which handles all of the processing and computing requirements within the ROV. It runs our open-source BlueOS software that provides the tools and features necessary to operate and expand the vehicle. BlueOS runs the ArduSub vehicle control software, manages the camera and tether connection, and makes it easy to install extensions to add new features. BlueOS is always improving, and new capabilities will continue to roll out to all BlueROV2s.
At the surface, the pilot controls the ROV with a gamepad controller and a laptop running Cockpit, our open-source ground control station. Cockpit is a highly customizable user interface for vehicle control, live video, and sensor data.