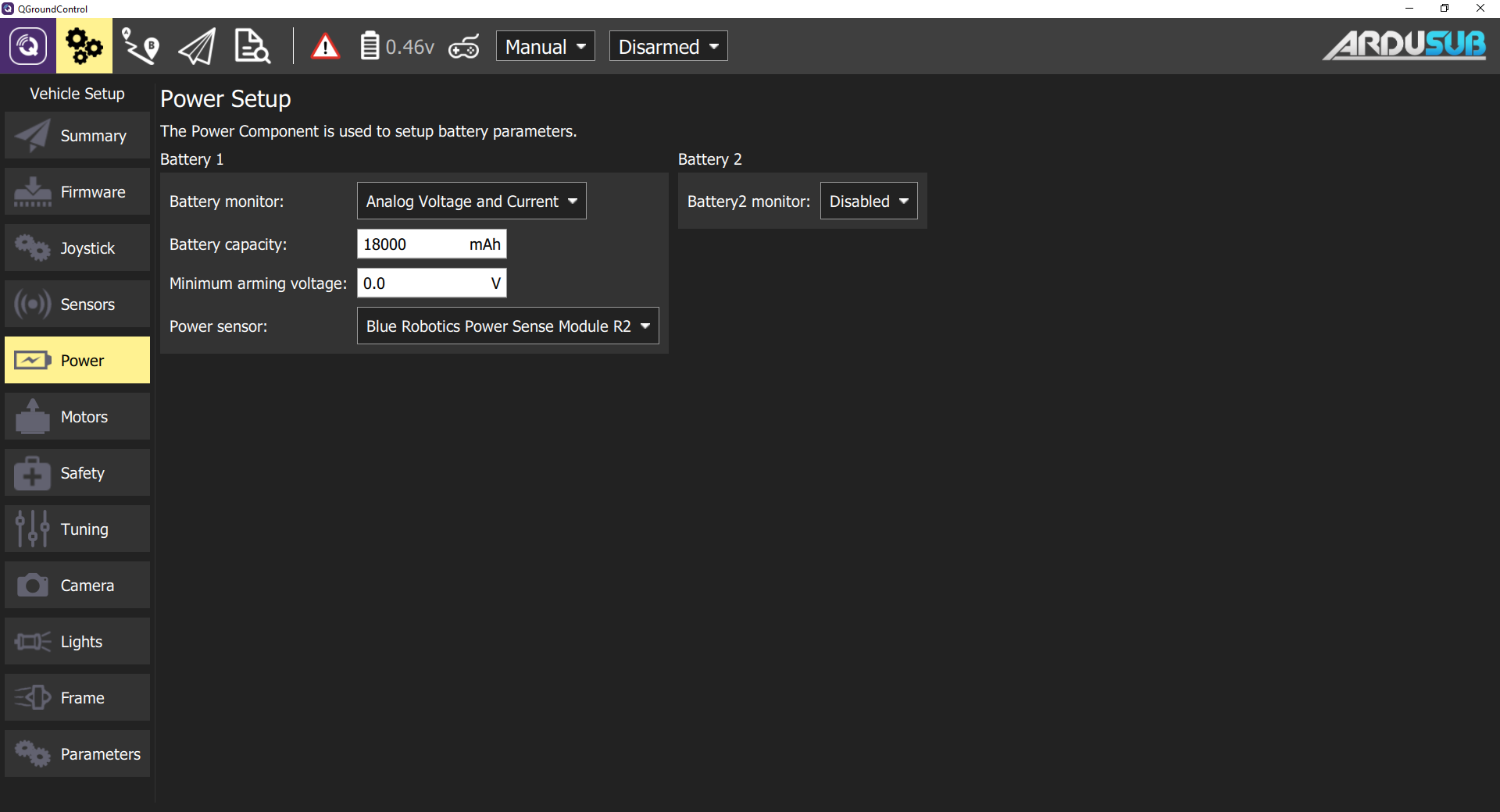
The Power Sense Module (PSM) provides analog current and voltage sensing to your Navigator Flight Controller or Pixhawk autopilot mounted either on your BlueROV2 or custom marine robotics project. ArduSub firmware supports the Power Sense Module and through QGroundControl will give you visual indications of battery level and current consumption.
This module uses a hall effect current sensor for excellent accuracy at low current draw.
Unlike standard power modules, the Power Sense Module will NOT provide 5V power, only current and voltage sense. On the BlueROV2, the Navigator Flight Controller is powered from multiple sources so this 5V power supply is not needed.