Remote Control of a BlueROV using Underwater Acoustic TransmissionsFerraresso, N.; Costa, D.Researchers used a BlueROV2 Heavy to test tether-free teleoperation over underwater acoustic modems using ROS 2, no vehicle modifications required….
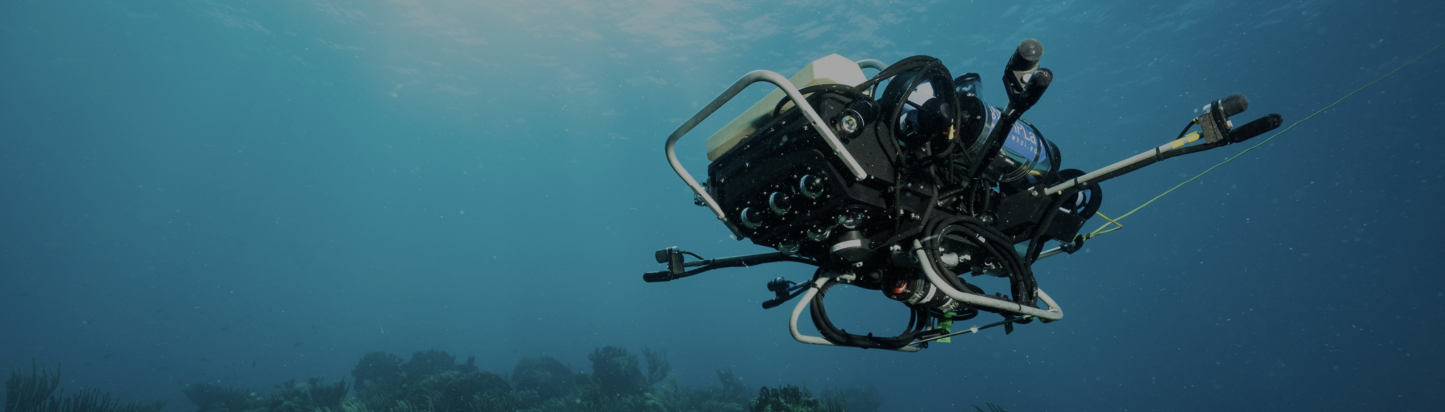
CUREE: A Curious Underwater Robot for Ecosystem ExplorationGirdhar, J.; McGuire, N.Traditional coral reef surveys rely on divers or static cameras, which often miss the full complexity of underwater ecosystems. Researchers…
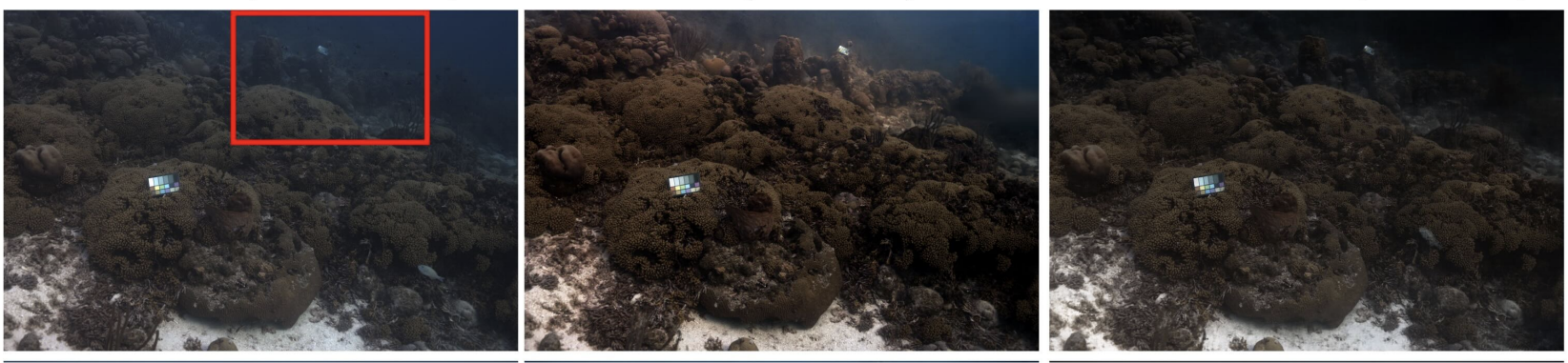
SeaSplat: Representing Underwater Scenes with 3D Gaussian Splatting and a Physically Grounded Image Formation ModelYang, D.; Leonard, J. J.It’s difficult to see underwater. Underwater imaging typically has distorted colors or a hazy appearance. Researchers set out to fix…
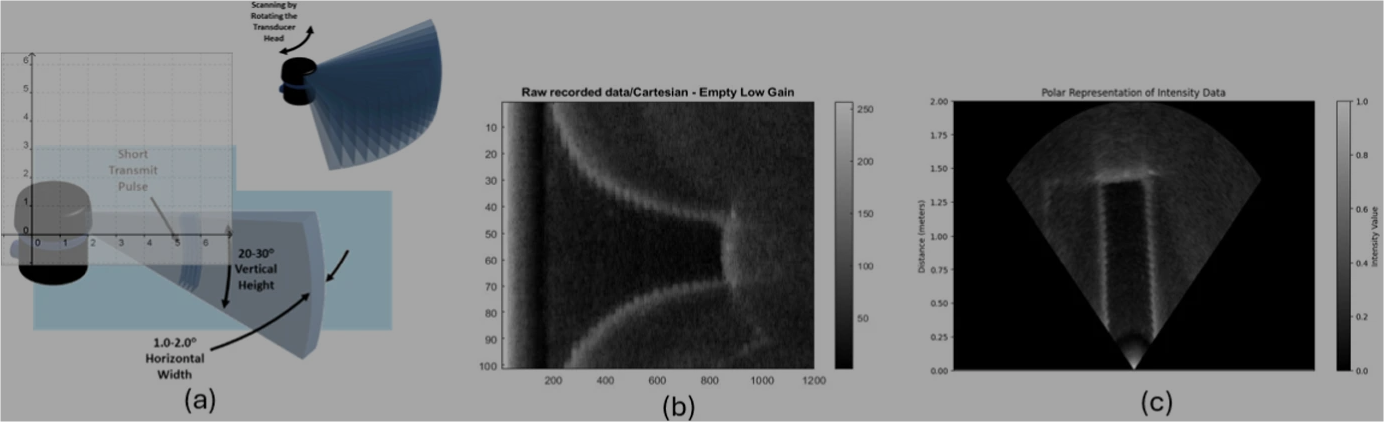
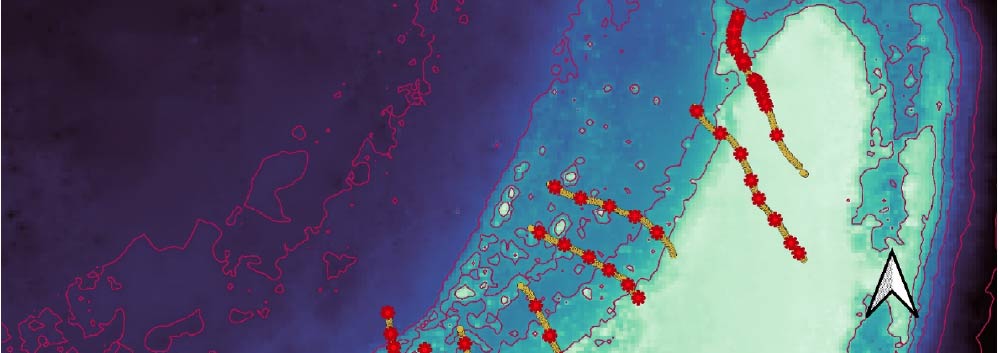
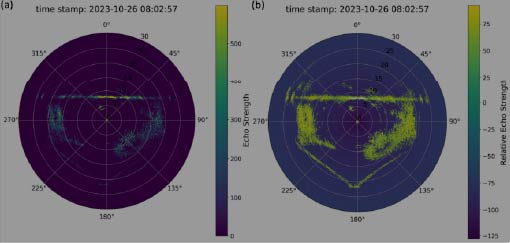
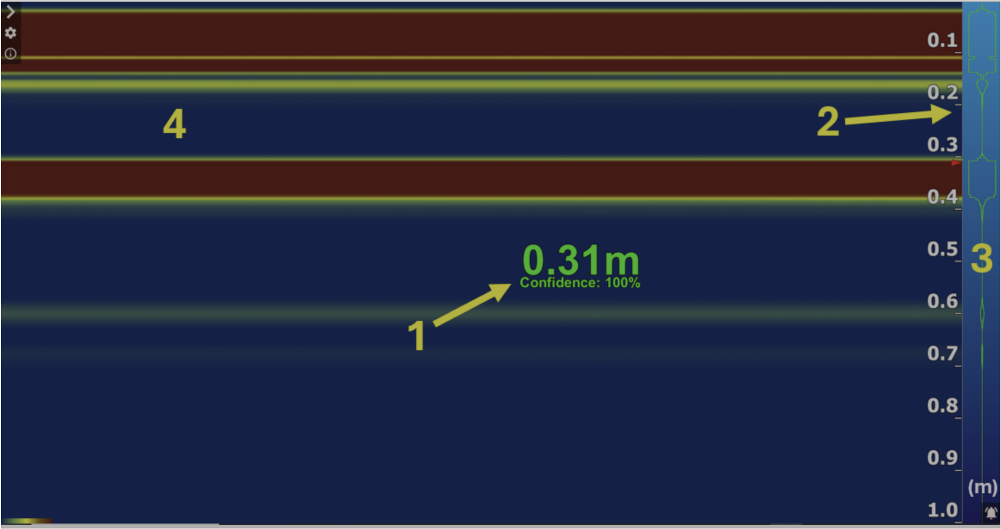
Interpreting navigation sonar data for object detection: a feasibility study using the Ping360Hasan, M. J.; Kannan, SResearchers explored whether the Ping360 Scanning Sonar could be used for more than navigation, specifically whether it could detect and…
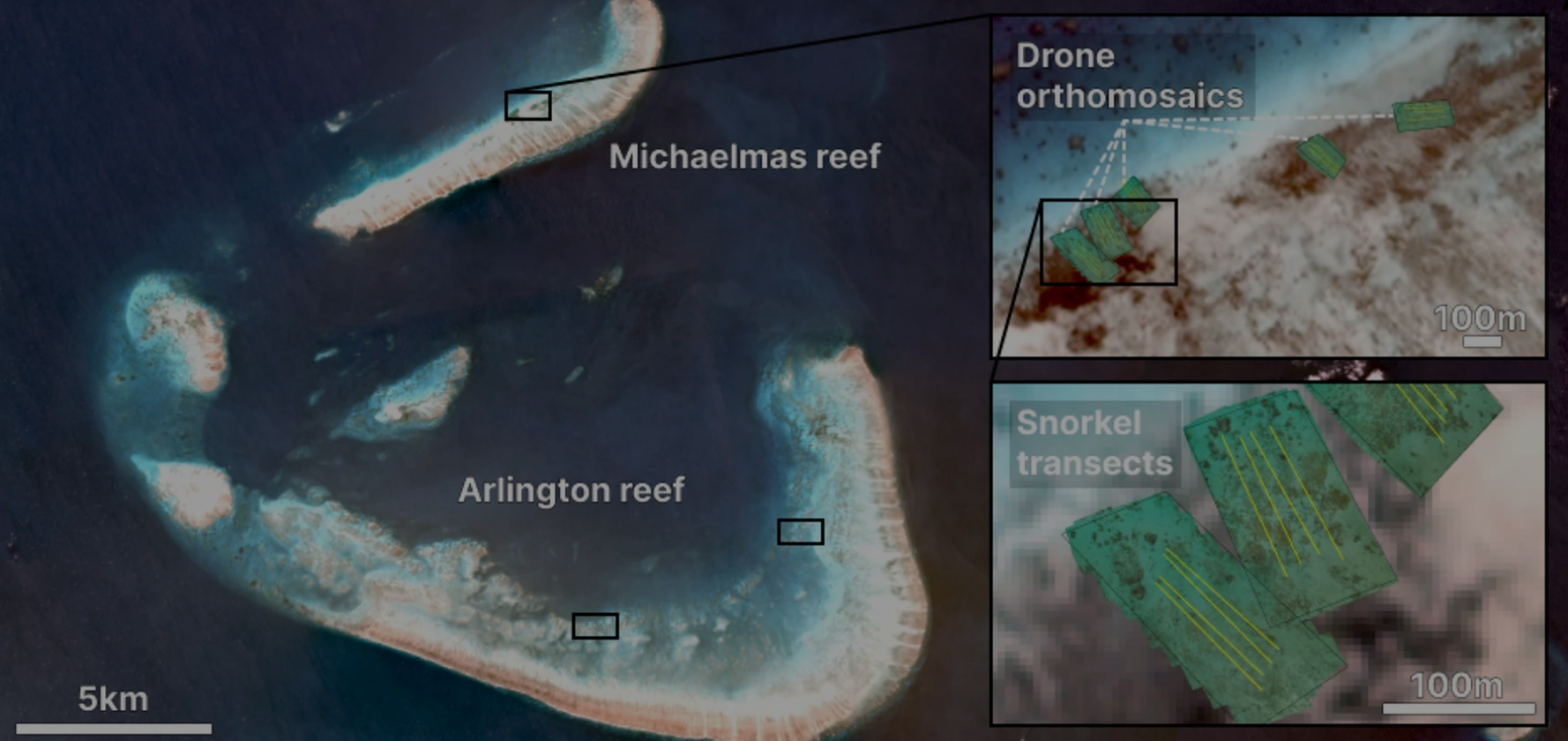
Modernising sea cucumber surveys using remotely operated vehicles and aerial dronesWilliamson, J. E.; Joyce, K. E.Researchers set out to evaluate whether aerial drones and ROVs could serve as faster, more flexible alternatives to traditional snorkel…
Rapid surveying of benthopelagic ecosystems with a towed mini-ROVRaoult, V.; McSpadden, K.Researchers towed a BlueROV2 for surveying benthic communities as a faster, deeper alternative to traditional snorkel and SCUBA surveys. Where…
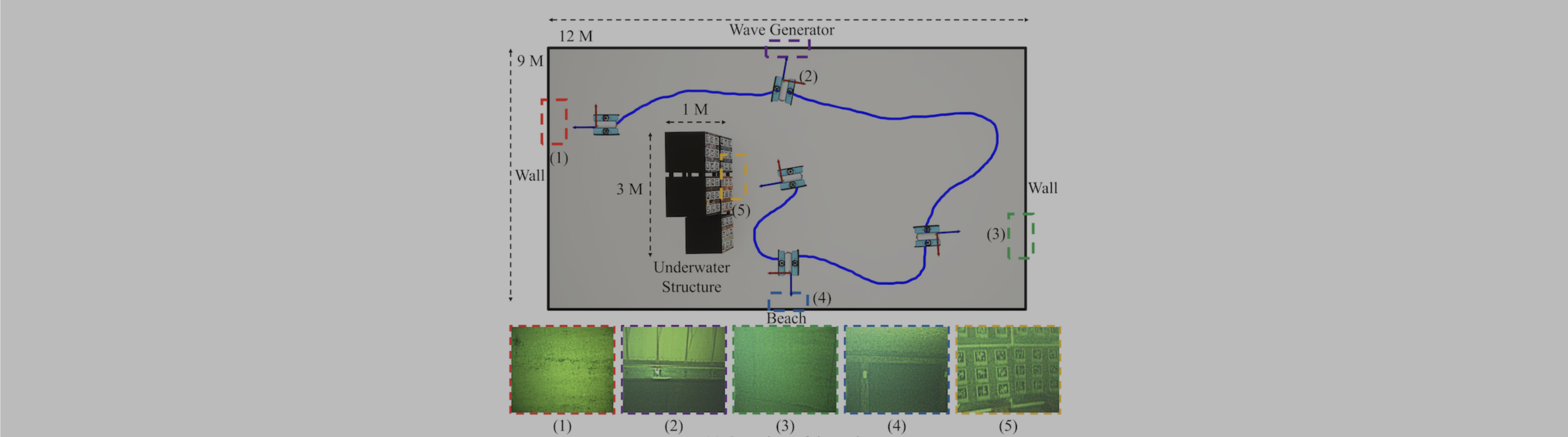
Monitoring behavior of post-smolts Atlantic salmon (Salmo salar) during their first month after sea transfer…Sauphar, C.; Bolinches, P.Researchers deployed the Ping360 Scanning Sonar to monitor Atlantic salmon in a commercial sea cage during the first six weeks…
Practical identification approach for the actuation dynamics of autonomous surface vehicles with minimal instrumentationMorel, T.; Orihuela, L.This study introduces an easy way to figure out how an ASV moves and how its propellers work using minimal…
AQUA-SLAM: Tightly-Coupled Underwater Acoustic-Visual-Inertial SLAM with Sensor CalibrationShida Xu, S.; Zhang, K.Underwater environments are tough for mapping and navigation systems. To solve this, the researchers introduce AQUA-SLAM, a new system that…
Detection of Underwater Mines Using SonarPirot, L.Detecting underwater mines and unexploded ordnance, particularly those buried under sand, is challenging and poses a threat to maritime navigation…