
Tag Archives:
Connecting Your Device with Navigator and BlueOS
Get things connected to your BlueOS powered vehicle! Whether Serial, I2C, Ethernet or USB, collecting data for your application is possible!

Navigator Retrofit Guide
This guide will show you how to replace the Pixhawk autopilot with a new Navigator Flight Controller in your BlueROV2.
Navigator Developer Guide
Access the Navigator hardware directly using the Navigator Library!
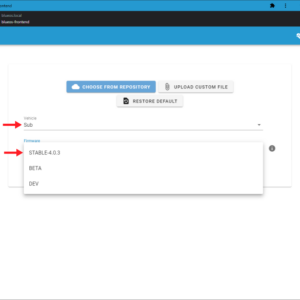
Navigator Software Setup
Learn how to install ArduPilot firmware using BlueOS and configure your vehicle using ground control station software.
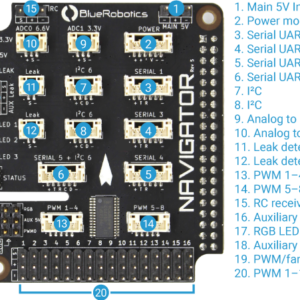
Navigator Hardware Setup
Learn how to assemble the Navigator kit and connect your vehicle hardware.