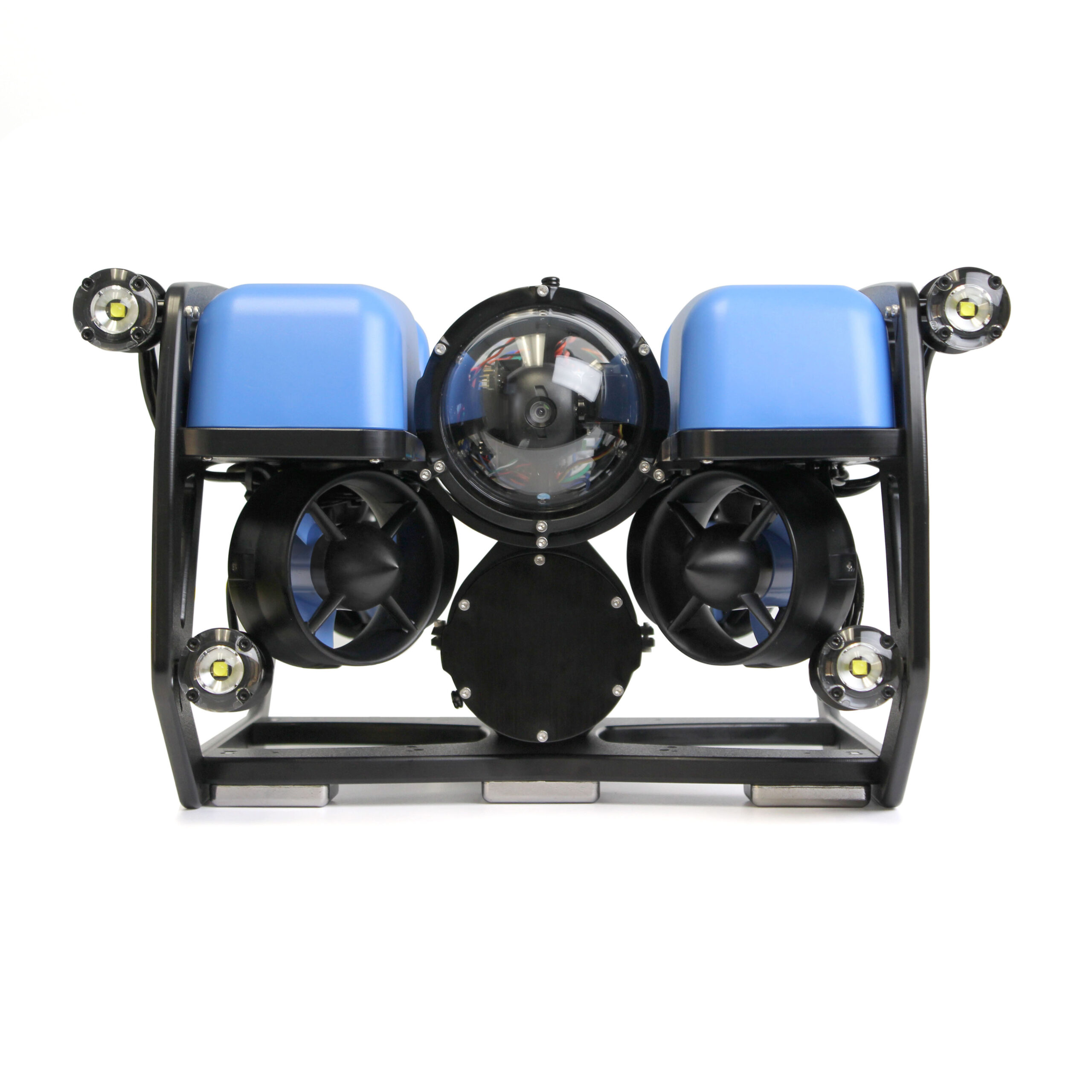
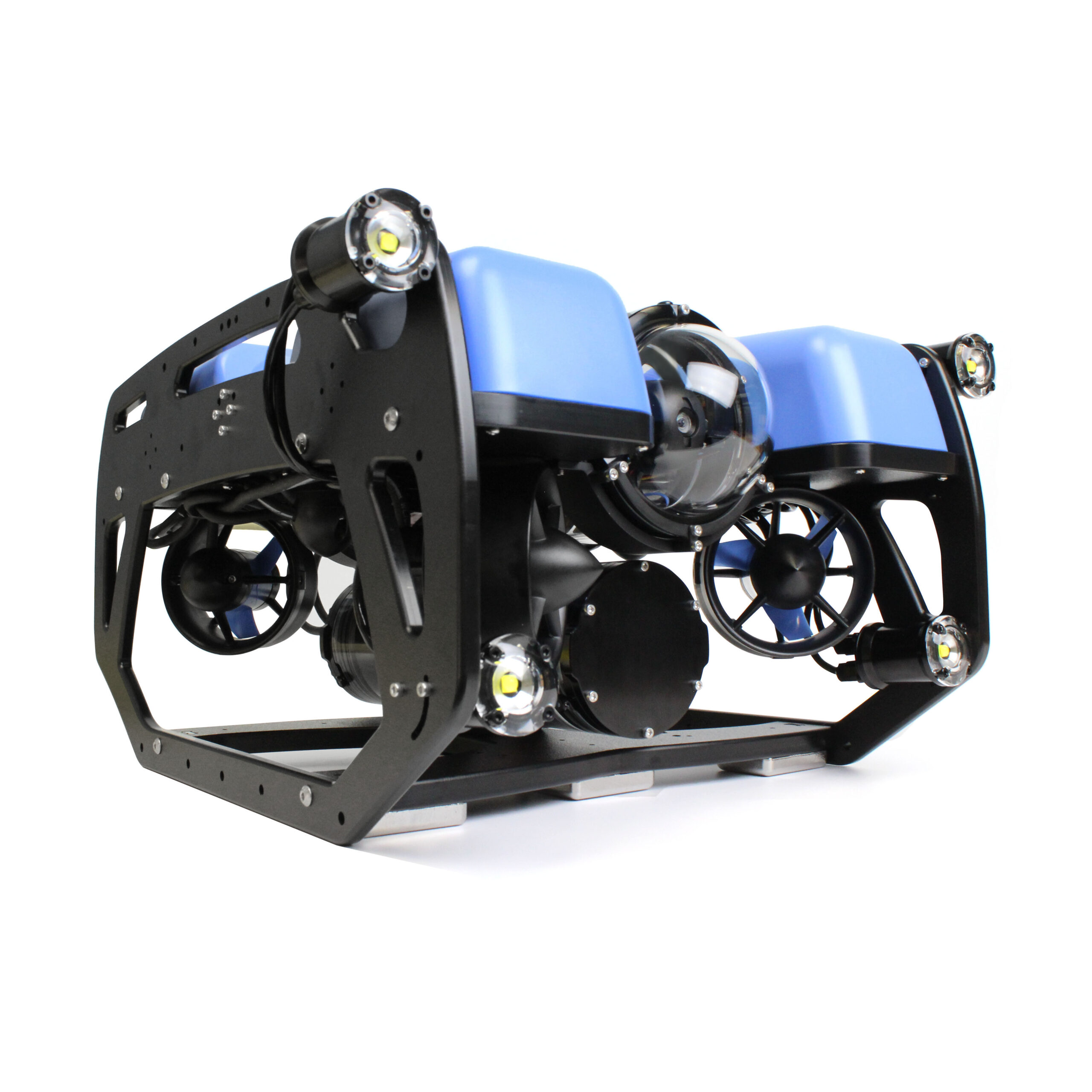




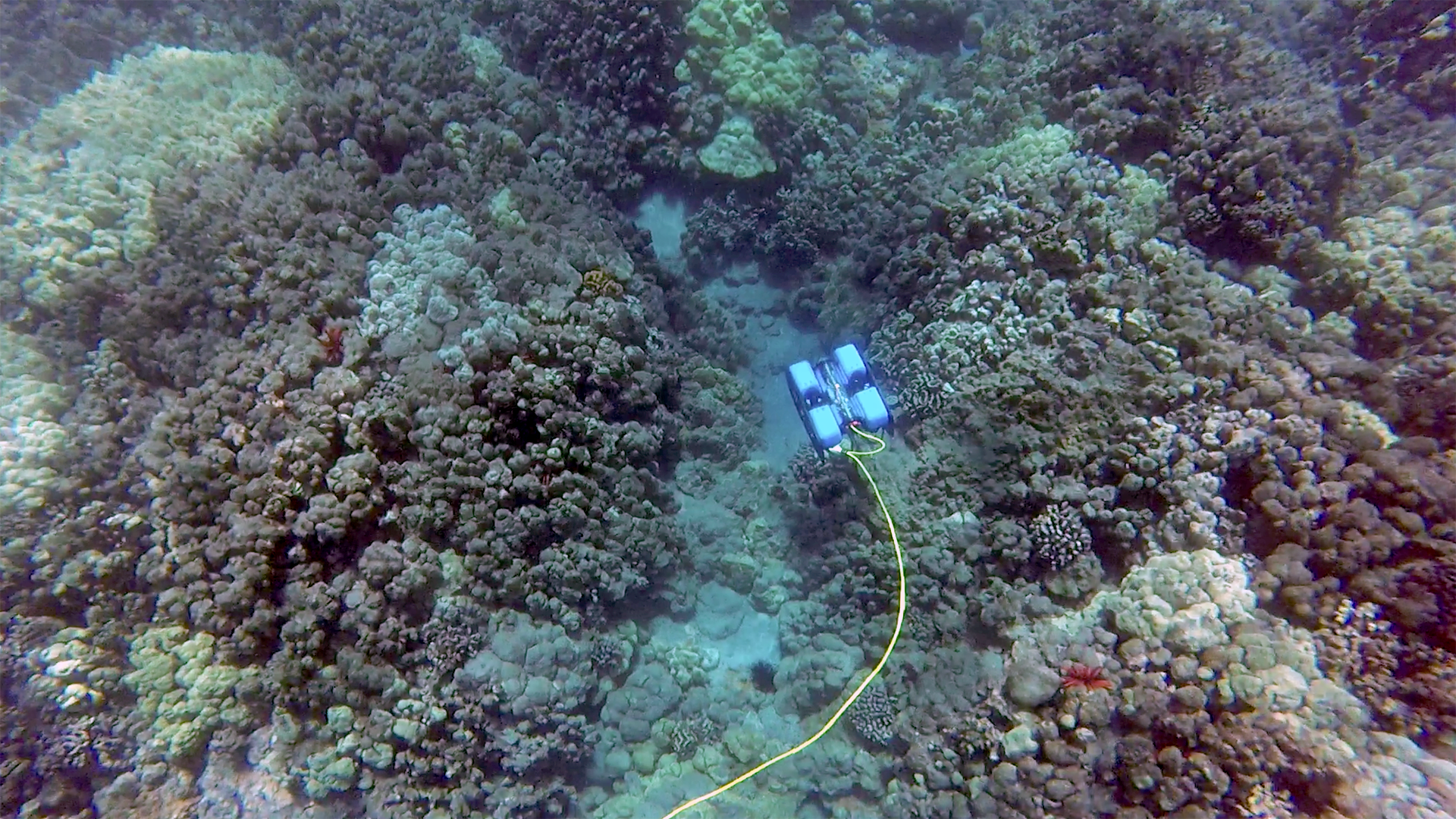
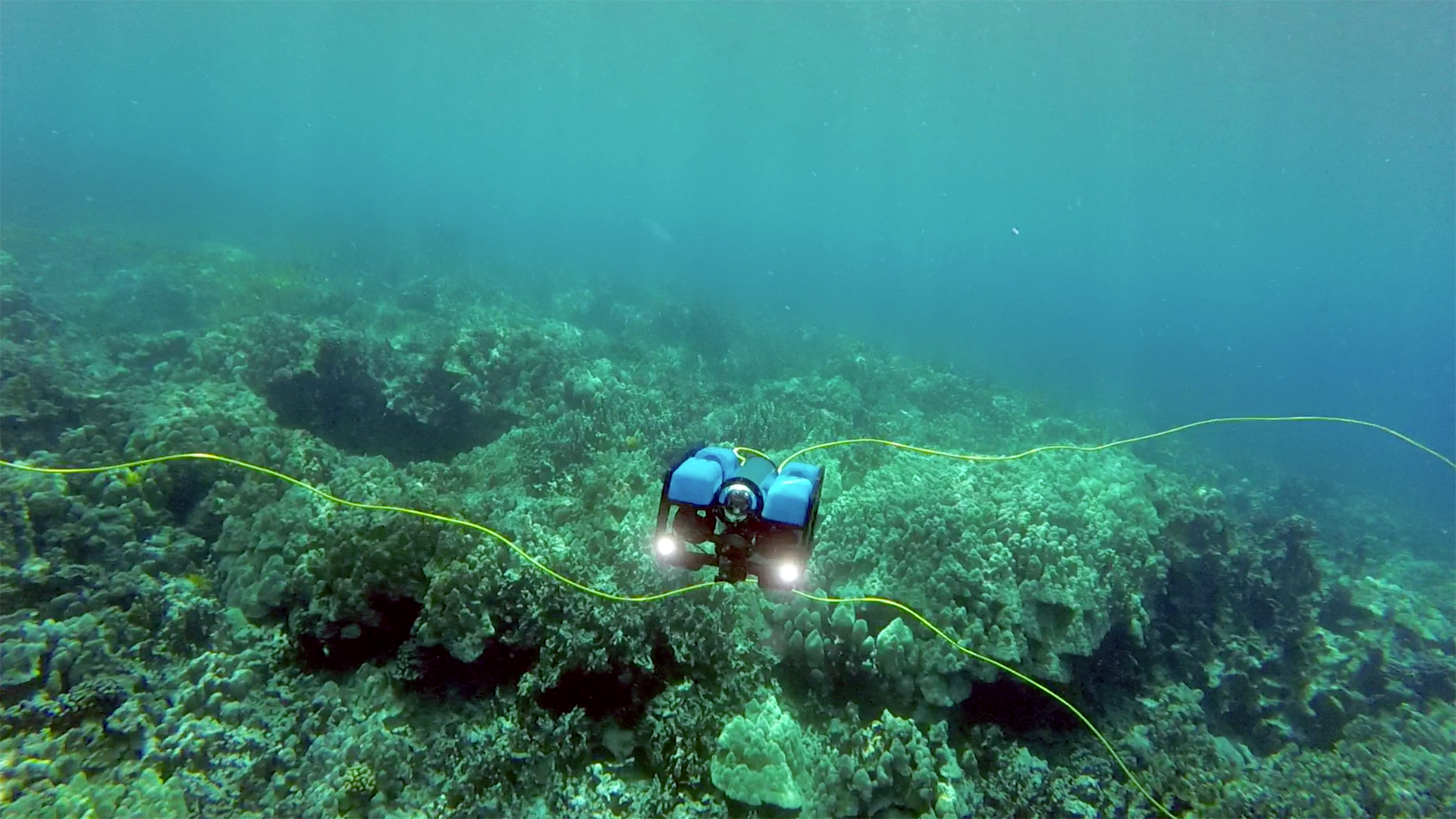
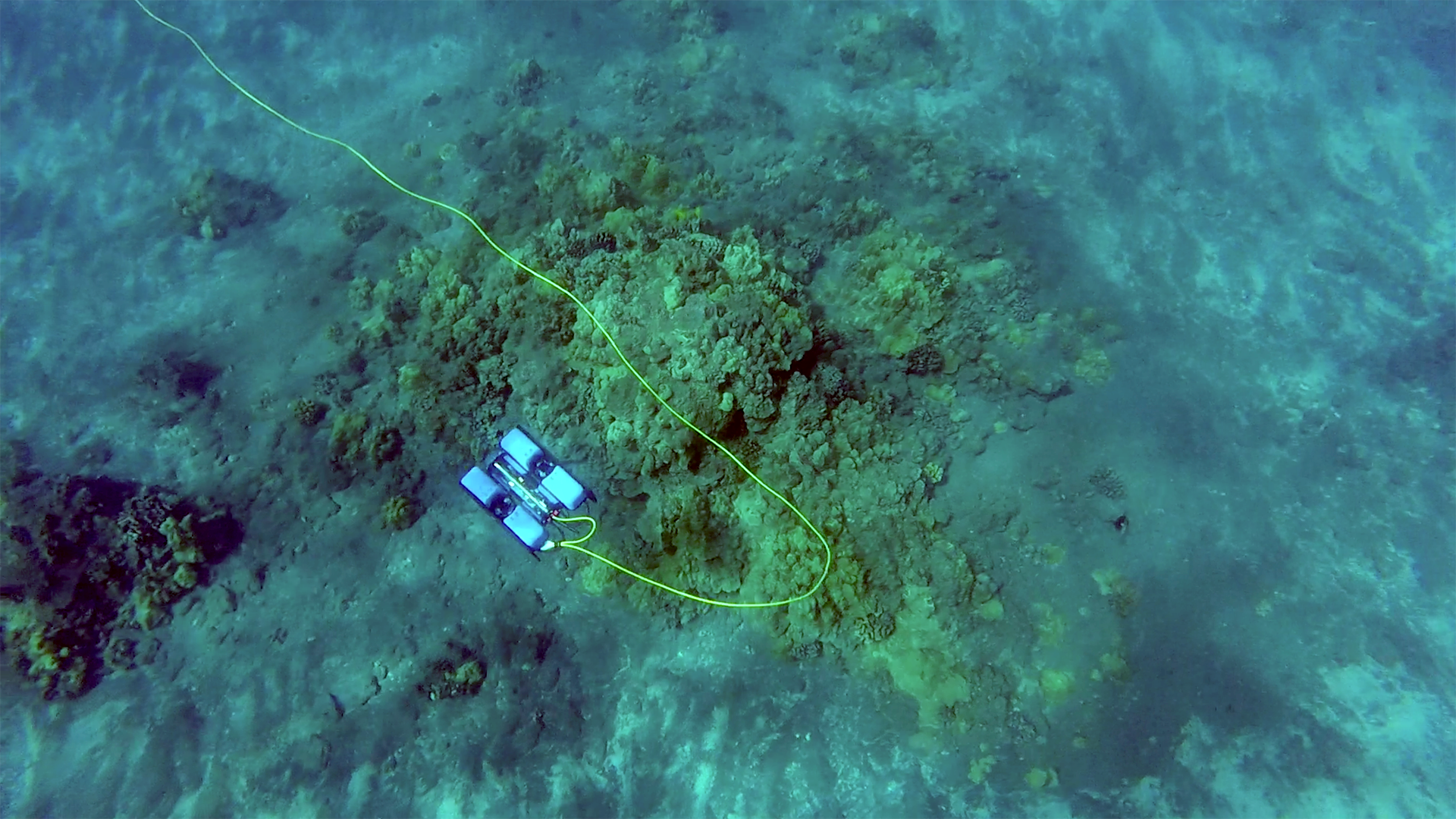
The Blue Robotics BlueROV2 is the world’s most affordable high-performance underwater ROV. With six- and eight-thruster configurations, a number of available accessories, and open source software, it has an unprecedented level of performance, flexibility, and expandability. With several thousand units out in the field, the BlueROV2 is one of the most popular underwater drones on the market!
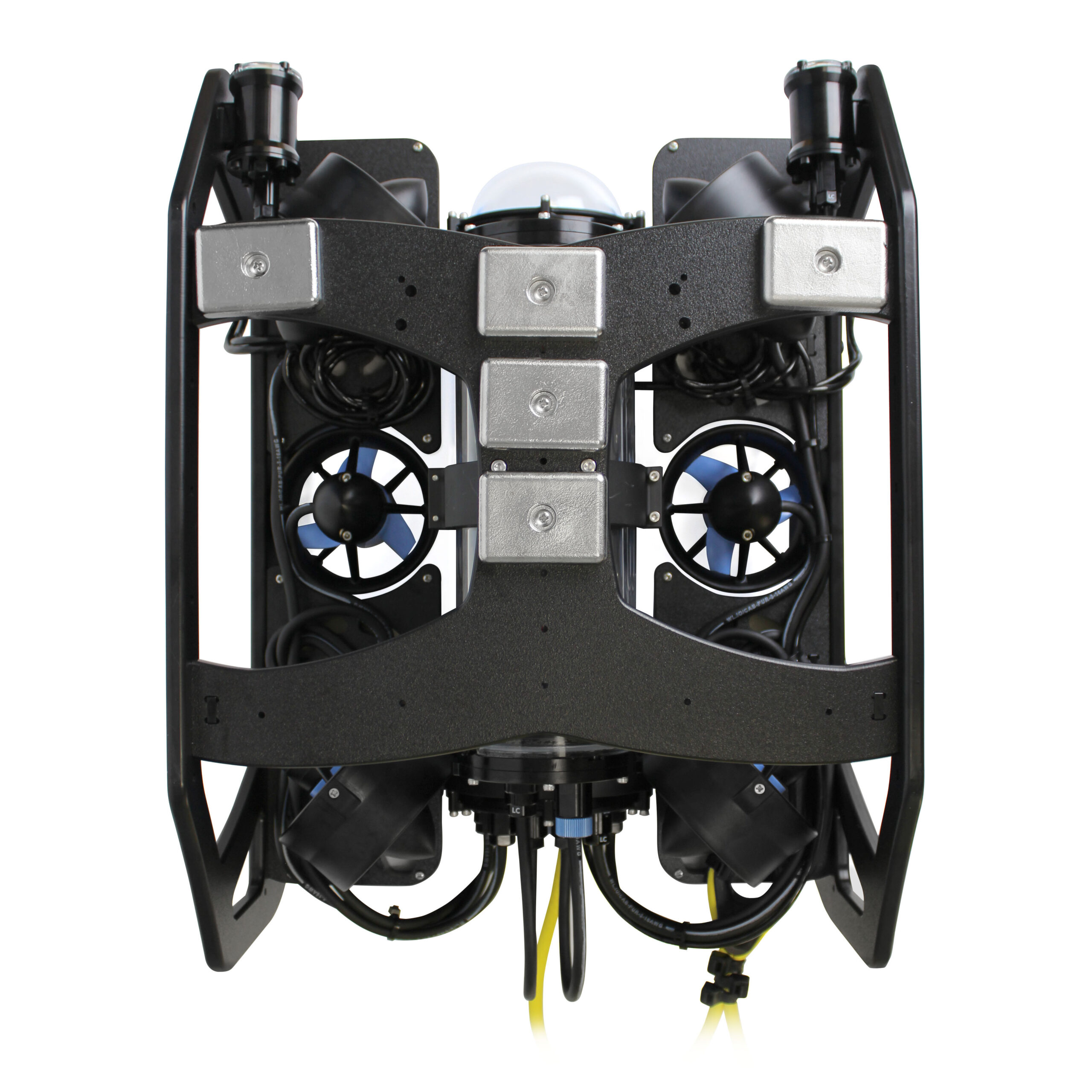
The BlueROV2 comes partially assembled and requires 6-8 hours of user assembly to complete. During the assembly process, you learn how all of the components of the system work and fit together and it leaves you with the knowledge needed to make upgrades and improvements in the future!