| Performance |
| Endurance @ 1 m/s (~30 W), no payload: |
| 2 Batteries (532 Wh, 2.4 kg) | 18 hrs (65 km) |
| 4 Batteries (1064 Wh, 4.7 kg) | 36 hrs (130 km) |
| 6 Batteries (1596 Wh, 7.0 kg) | 50 hrs (180 km) |
| 8 Batteries (2128 Wh, 9.3 kg) | 62 hrs (220 km) |
| Solar Power (user equipped) | Indefinite |
| Maximum Speed (2 batteries, no payload) | 3 m/s | 6 kts |
| Maximum Static Thrust | 8.2 kgf | 18 lbf |
| Temperature Rating | -25 to 40°C | -13 to 104°F |
| Steering | Differential thrust |
| Payload and Expansion Capabilities |
| Payload Capacity (batteries + payload) | 15 kg | 33 lb |
| Payload Power | Battery Voltage @ 60 A (Direct Connection)
Battery Voltage @ 10 A (Fuse Board)
5V Auxiliary @ 5 A (Fuse Board) |
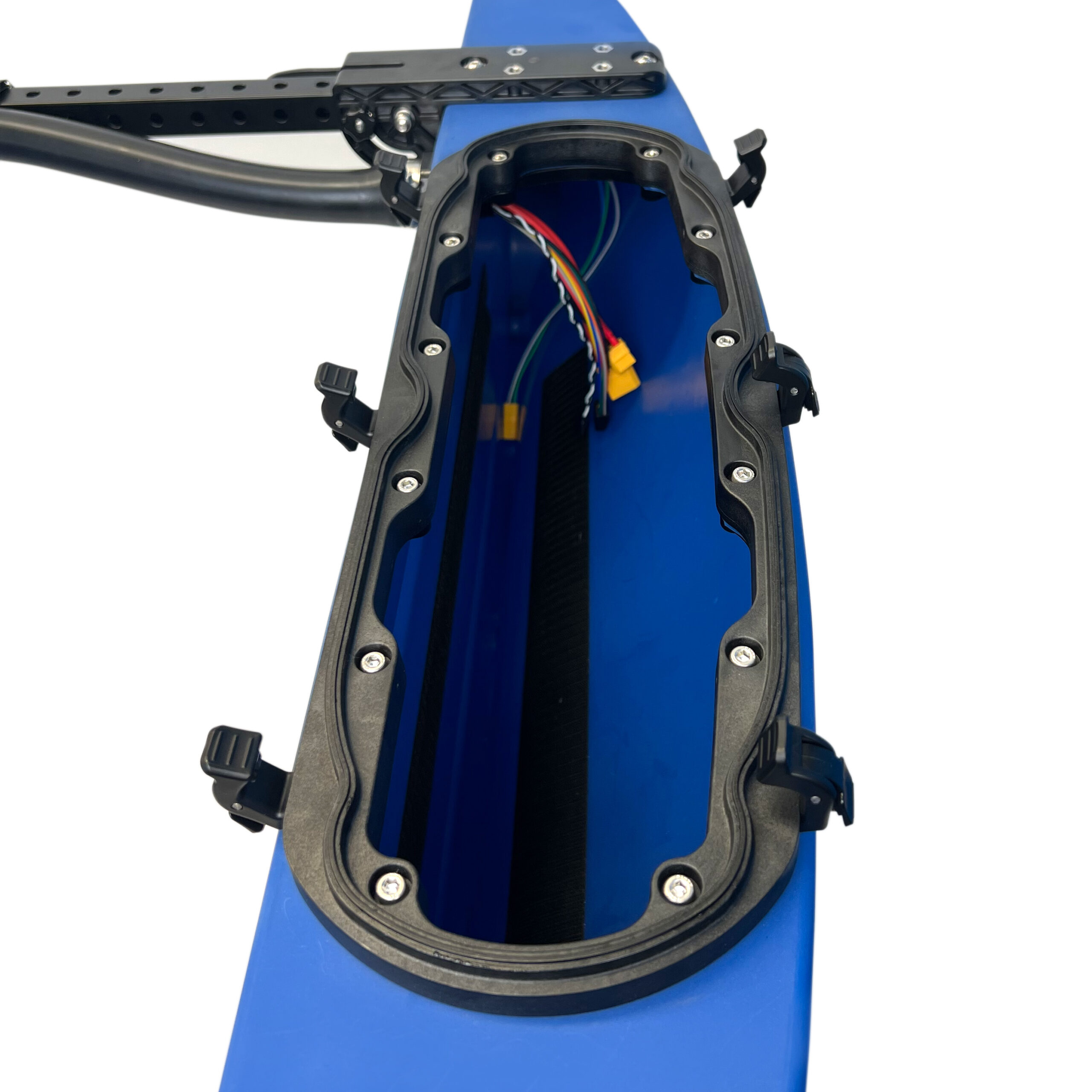
Penetrator Holes (Starboard Hatch Lid)
| 2 x M10
Area to drill more |
| Penetrator Holes (Port Hatch Lid) | 4 x M10
2 x M14
Area to drill more |
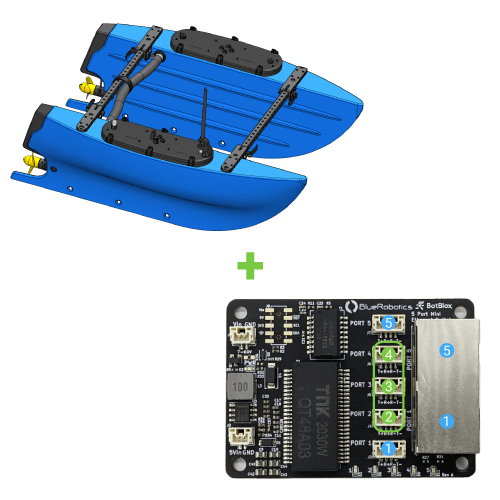
| Available Ports and Interfaces | 3 x Serial UART
Ethernet (Blue Robotics Ethernet Switch required)
2 x USB 2.0
2 x USB 3.0
1 x 16-bit ADC (3.3 V)
1 x 16-bit ADC (6.6 V) |
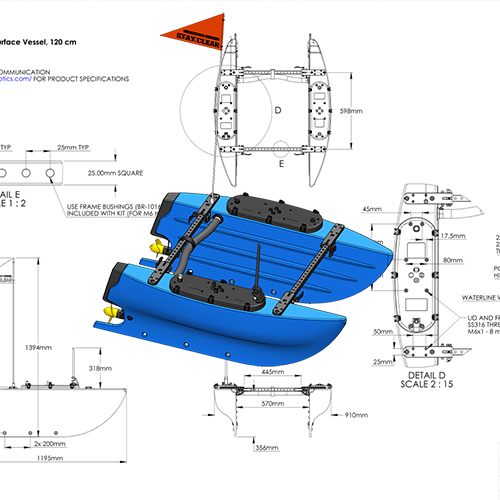
| Physical |
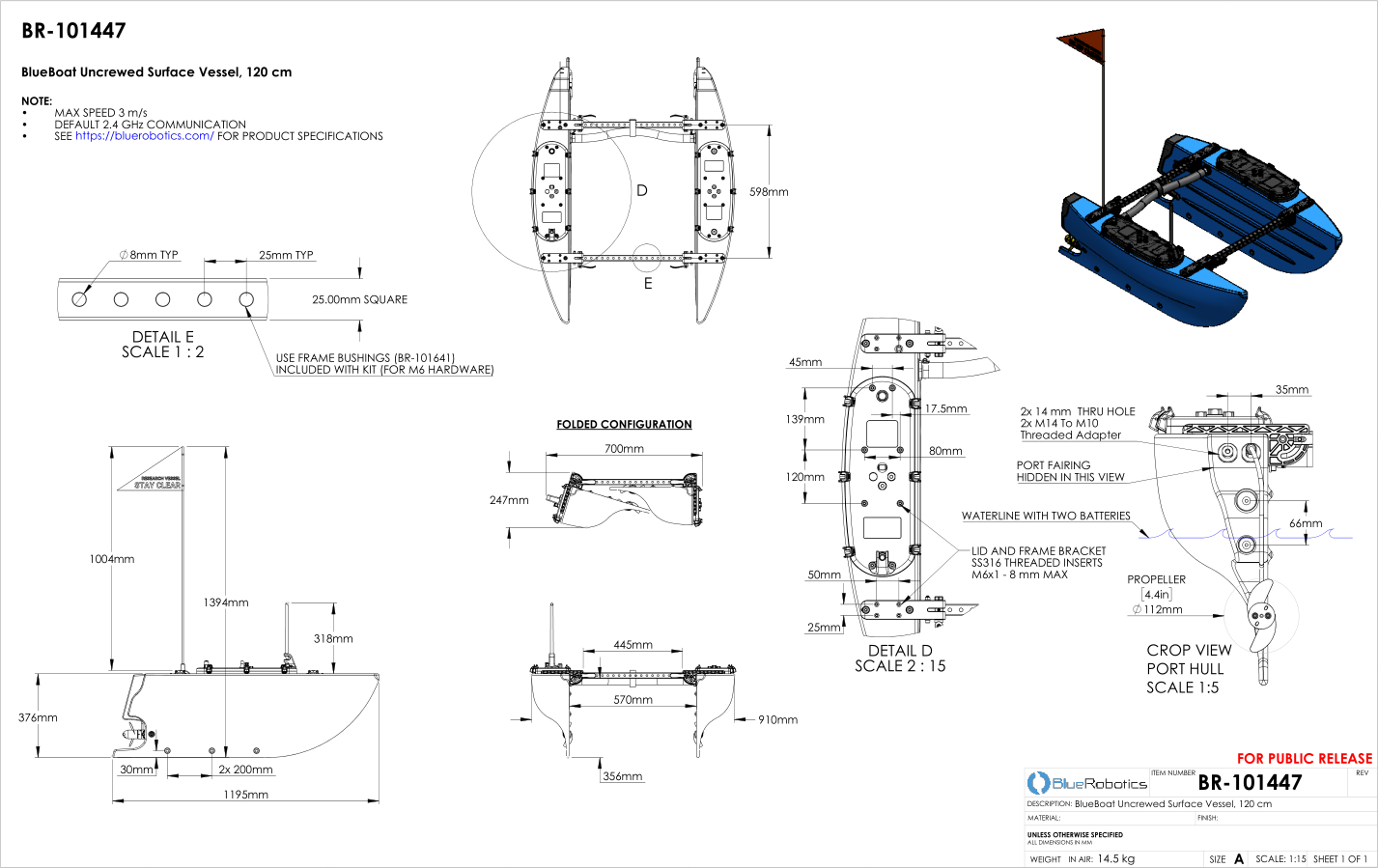
| Dimensions (Length x Width x Height) | 120 x 93 x 46 cm (deployed)
120 x 71 x 24 cm (folded)
120 x 46 x 20 cm (packaged) | 47 x 36.5 x 18 in (deployed)
47 x 28 x 9.5 in (folded)
47 x 18 x 8 in (packaged) |
| Weight (no batteries or payload) | 14.5 kg | 32 lb |
| Freeboard (2 batteries, no payload) | 160 mm | 6.3 in |
| Maximum Draft (maximum payload) | 320 mm | 12.6 in |
| Propulsion | 2x M200 Motor w/ Weedless Propeller |
| Propeller Diameter | 112 mm | 4.4 in |
| Navigation Light | 5V 2W LED, White All-Around, Programmable Flashing |
| Primary Materials | LDPE (hulls)
30% Glass-filled Polycarbonate
Anodized Aluminum
Stainless Steel |
| Hull Color Codes | Mariner Blue - HEX #3366CC
Garibaldi Orange - PANTONE 137C
Moray Green - PANTONE 13-0443 TCX
Axolotl Pink - PANTONE 1787 C |
| Communications |
| Wireless Communications Protocol | 802.11a/b/g/n (2412 - 2462MHz) |
| Wireless Router | MikroTik RBGroove-52HPn |
| Default Wireless Configuration | Client Mode (CPE) |
| BaseStation Router Default IP Address | 192.168.2.3 |
| BlueBoat Router Default IP Address | 192.168.2.4 |
| Included Antenna | 7 dBi 2.4Ghz Omnidirectional, N-type male connector |
| Wireless Range for Telemetry and Control (w/ included antennas) ¹ | up to 250 m | up to 0.135 NM |
| Wireless Range for Telemetry and Control (w/ directional antennas, not included) ¹ | >800 m | >0.43 NM |
| Cellular & Satellite Communications | Capable |
| Software | | |
| Vehicle Control | ArduRover |
| Onboard Operating System | BlueOS |
| Onboard Operating System Default Address | blueos.local (192.168.2.2) |
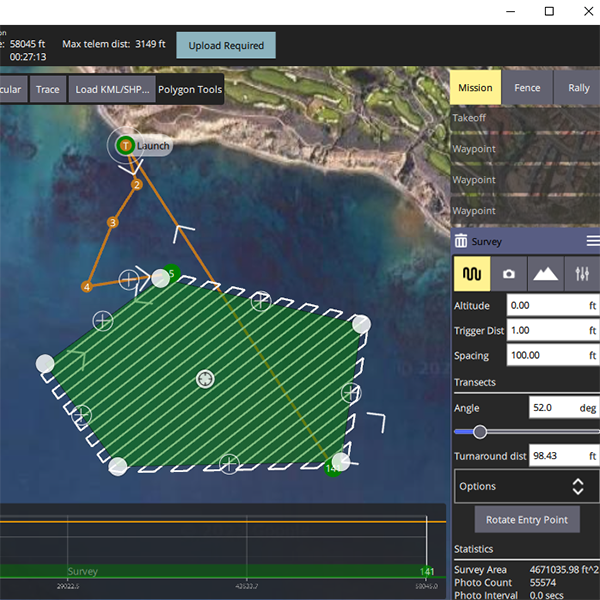
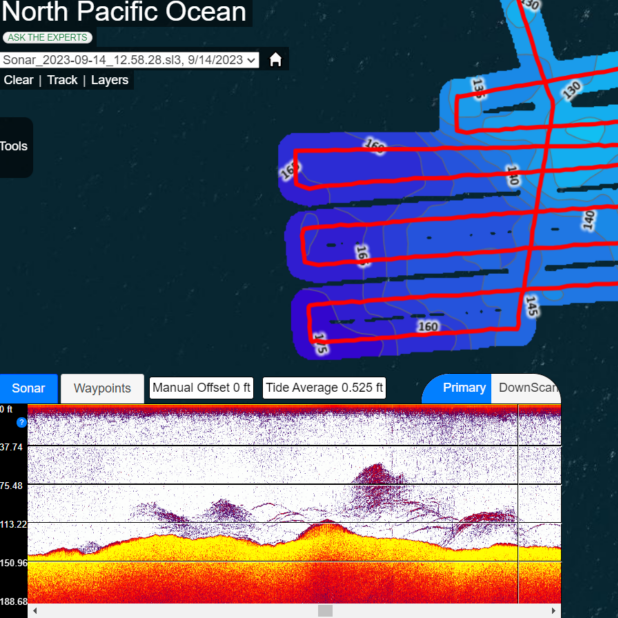
| Recommended Mission-planning Software | QGroundControl or Mission Planner |
| Navigation Capabilities | Manual Control (w/ Joystick)
Waypoint Navigation (Auto)
Click-to-Navigate (Guided)
Position Hold (Loiter)
Return-to-Home (if connection lost) |
| Electronics and Electrical System |
| Onboard Computer | Raspberry Pi 4 (2GB) w/ BlueOS |
| Flight Controller | Navigator |
| Sensors | 6-DOF IMU
Dual 3-DOF compasses
Internal barometer |
| GPS | mRobotics M10034-M9N, (NEO-M9N, IST8308) |
| Speed Controllers | Basic ESC 500 (BlueBoat Configuration) |
| Power Load Switching | PowerSwitch (120A, 4S/6S Battery, Current/Voltage Sense, 5V/8A Out) |
| Recommended Battery | Blue Robotics 4S Lithium-Ion |
| Input Voltage Range | 12–26 VDC² (4S–6S Batteries) |
| 4S Low Battery Voltage Protection Cutoff | 8 V |
| 6S Low Battery Voltage Protection Cutoff | 12 V |
| 5V Auxiliary Output | 5 A |
| Individual Battery Fuses | 60 A MIDI |
| System Fuse | 150 A MIDI |
| Fuse Board | Mini-ATC (2 A, 5 A, 10 A fuses included) |
| Regulatory |
| Harmonized code | 8907.90.0090 (BlueBoat only)
9015.80.8080 (when equipped with hydrographic sensors) |
| Compatible Operating System |
| Windows | Windows 10 64-bit or later |
| macOS | 10.20 or later |
| Ubuntu | 20.04 LTS or later |
| Recommended Control Computer Hardware |
| Processor | i5 processor equivalent or better |
| RAM | 8GB or more |
| Storage | Solid-state drive (SSD) |