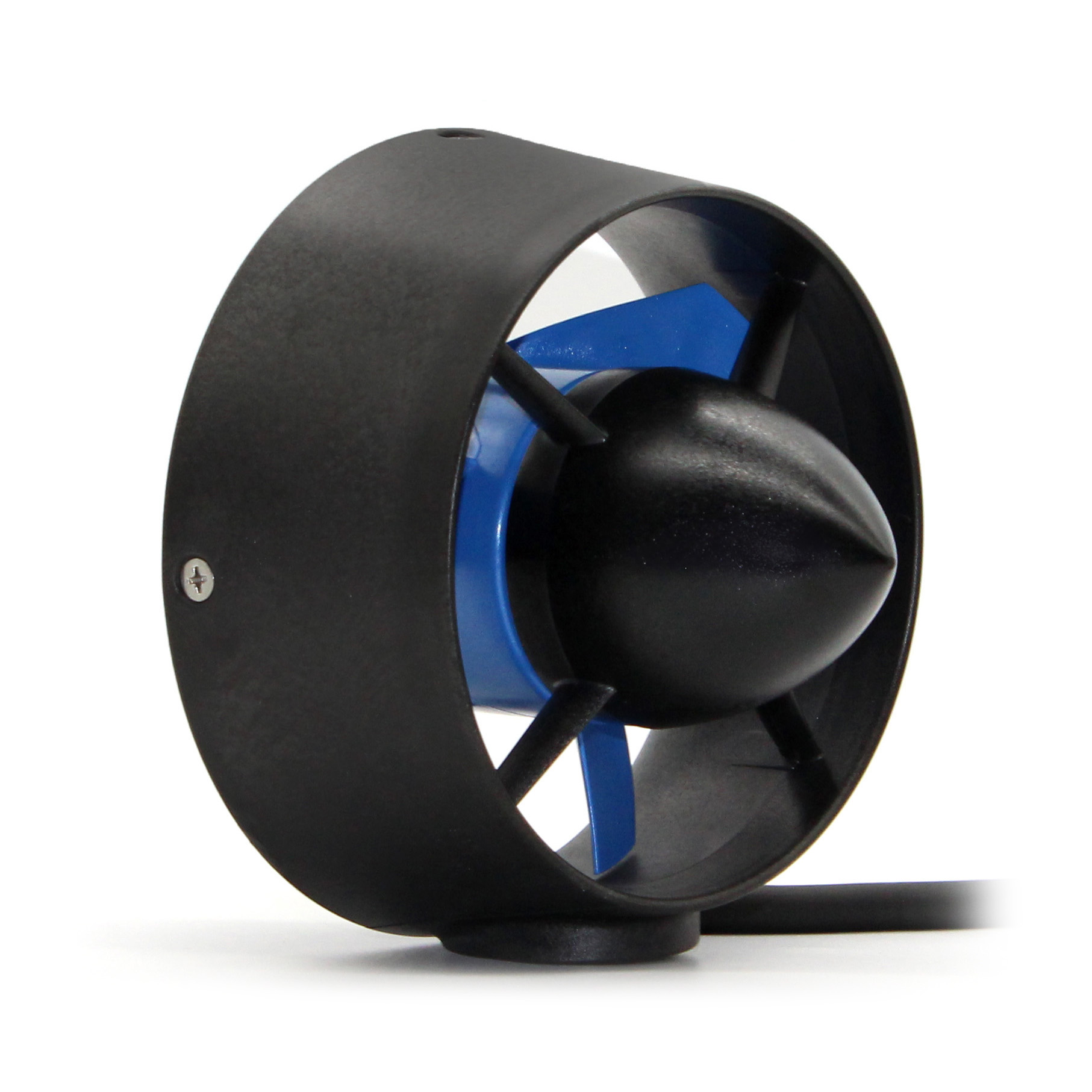

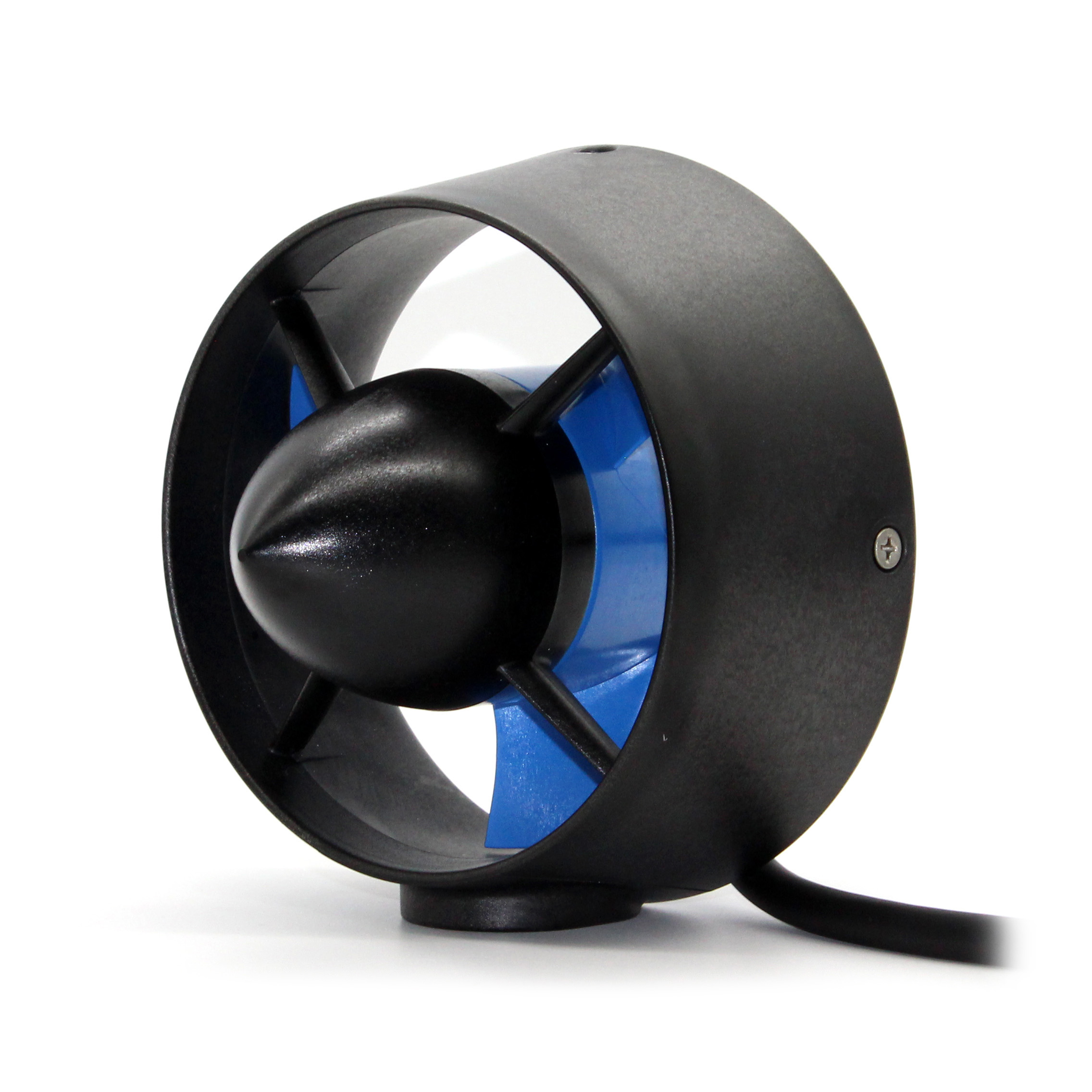


The T500 Thruster is our next-generation thruster with over three times as much thrust as the T200 Thruster. We designed it for high-power ROVs, surface vessels, and AUVs, as well as human-carrying applications like kayaks. It’s carefully designed to be rugged, powerful, and flexible in many applications.
The T500 is designed to achieve its maximum performance of 16.1 kgf (35.5 lb) of thrust at an operating voltage of 24V and power consumption of just over 1 kW. That said, it also operates well at 16V, the voltage of our BlueROV2 and lithium-ion battery. At 16V, it consumes a similar amount of power to the T200 Thruster, but is more efficient and generates 70% more thrust.