Specifications
Note that nominal operation at 12–16 V is recommended for the best balance of thrust and efficiency, though operation at up to 20 V is allowable. Exceeding 20 V is not within the rating and not recommended, please see here for more information.
For more detailed performance specifications, including thrust, RPM, power, and efficiency at various throttle levels and supply voltages from 10-20 V, please see the performance charts below.
Performance Charts
Click on the legend to hide or show the data set for each voltage. All the raw data and notes on the testing procedure used to generate these charts can be downloaded here:
T200-Public-Performance-Data-10-20V-September-2019 (.xlsx)
Thrust at 10–20 V
Current Draw at 10–20 V
Efficiency at 10–20 V
Thrust and Power at 10–20 V
RPM at 10–20 V
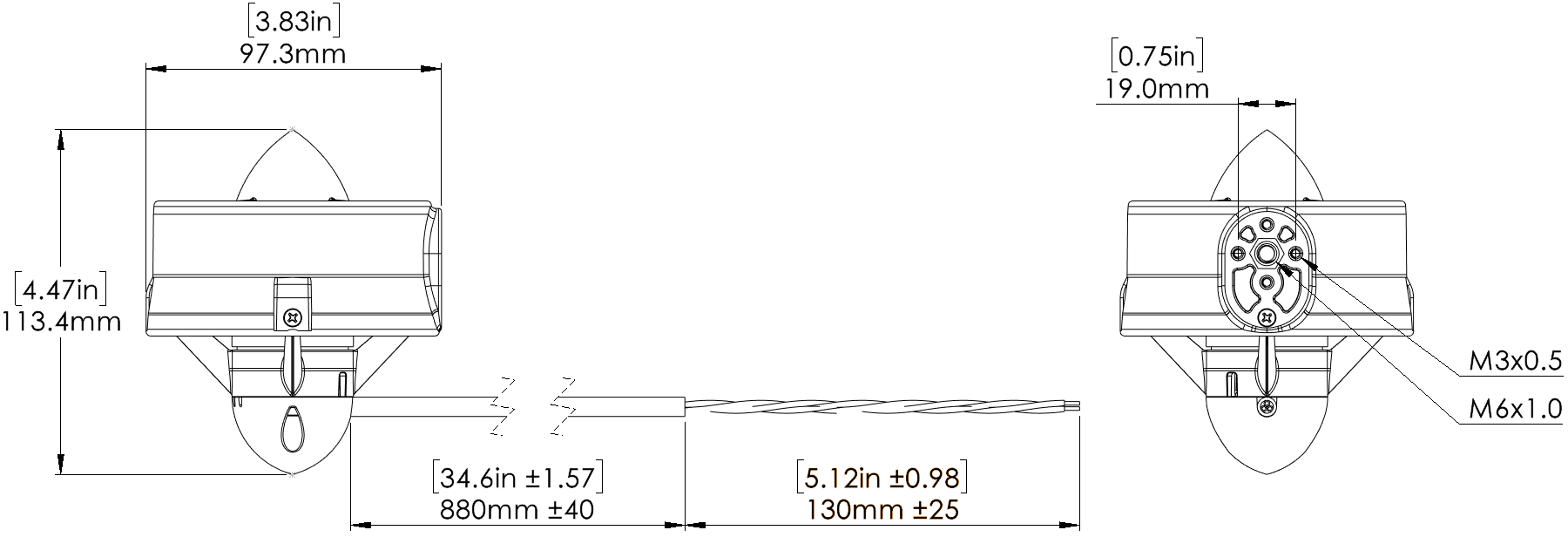
2D Drawings
3D Models
T200_THRUSTER_BR-100545_BR-100228 (.zip)
Revision History
7 May 2026
- Propeller material changed from 10% glass-filled polycarbonate to polycarbonate
4 March 2025
- Stator base changed to use O-ring seals instead of potting, for improved manufacturing consistency and reliability
- Tested depth set to 300 m
14 November 2024
- Added M6 threaded insert for single fastener mounting
21 May 2024
- Nose cone, nozzle, and propeller material changed to 10% glass-filled polycarbonate
29 June 2023
- T200-THRUSTER-R2-RP SKU changed to BR-100545
14 March 2023
- Serial number laser marking implemented
12 February 2021
- R2 - Initial release
- Changed thruster cable conductors from 18 AWG to 16 AWG
08 November 2019
- Changed stator from being epoxy coated to fully potted
- Added cooling holes to propellers
15 September 2019
- Changed finish of polycarbonate components from glossy to matte
19 September 2014