The Ping Sonar is a multipurpose single beam echosounder. It can be used as an altimeter for ROVs and AUVs, for bathymetry work aboard a USV, obstacle avoidance on autonomous vehicles, and other underwater distance measurement applications. The Ping Sonar combines a compact form factor and 300 meter depth rating with an open-source software to create a powerful new tool for marine robotics!
Ping Sonar Altimeter and Echosounder



$486.00
The Ping Sonar is a single beam echosounder that measures distances up to 100 meters underwater. A 25 degree beam width, 300 meter depth rating, and an open-source software interface make it a powerful tool for marine robotics. Can connect directly to the Navigator Flight Controller. For USB connections, we recommend connecting with the BLUART USB to Serial and RS485 Adapter!
| Quantity | 1 - 2 | 3 - 7 | 8 - 14 | 15 - 24 | 25+ |
|---|---|---|---|---|---|
| Price | $430.00 | $408.50 | $387.00 | $365.50 | $344.00 |
Product Description
What is a Single Beam Echosounder?
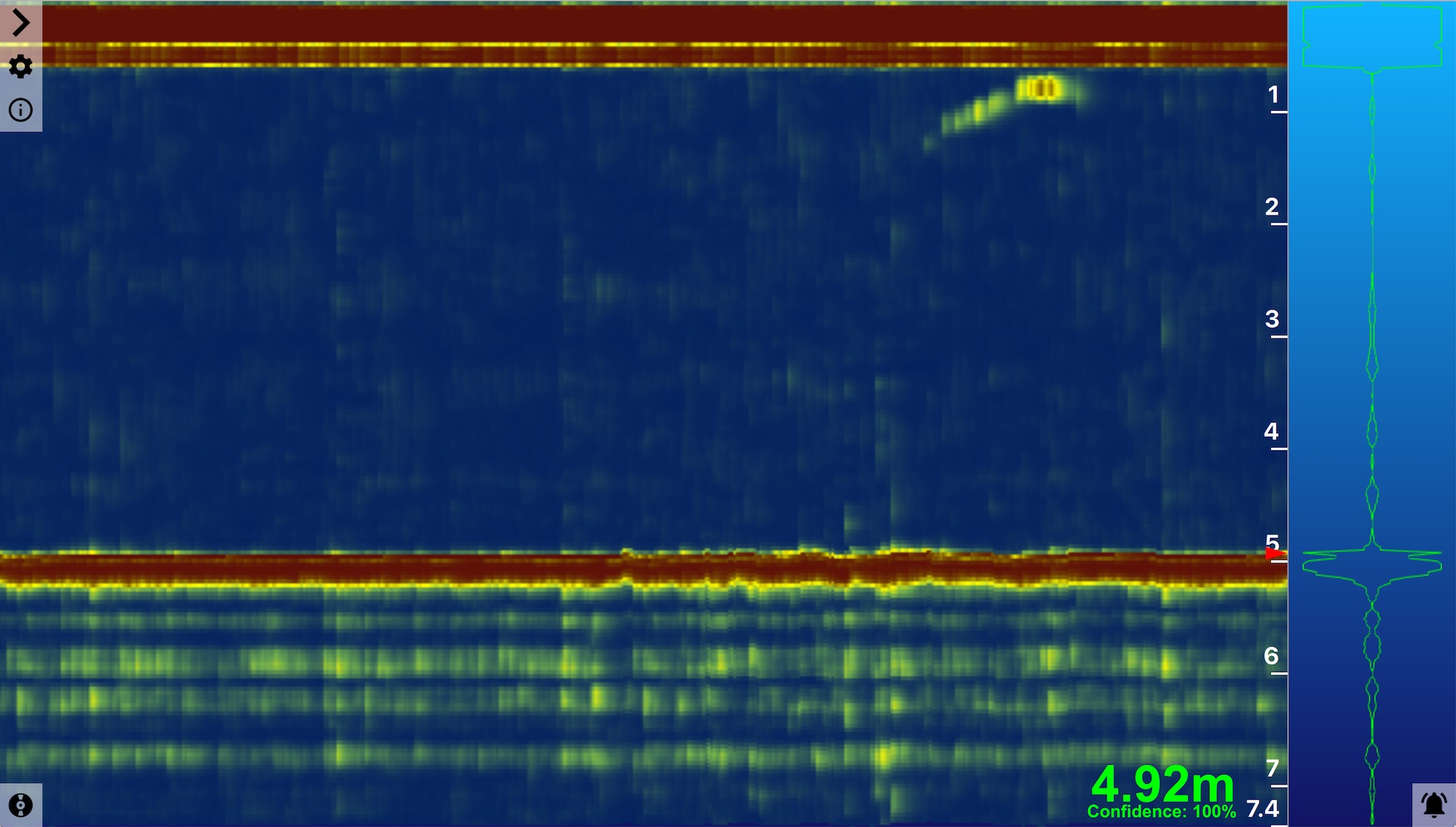
An echosounder, like the Ping Sonar, is one of the simplest forms of underwater sonar. It operates by using a piezoelectric transducer to send an ultrasonic acoustic pulse into the water and then listens back for echoes to return. With that information, it can determine the distance to the strongest echo, which is usually the ocean floor or a large object. It can also provide the full echo response (echo strength versus time) which can be plotted like the display of a fishfinder sonar.

Designed for the Depths
The Ping Sonar uses a 115 kHz transducer frequency, away from those used on most boat echosounders to avoid interference. It has a measurement range of 100 meters (328 feet) and a measurement beamwidth of 25 degrees, perfect for applications on a rocking boat or for obstacle avoidance. An advanced bottom-tracking algorithm runs on the device to determine the distance to the seafloor, even in complicated situations with multiple echoes.
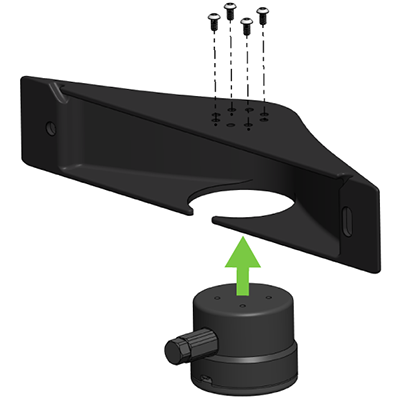
The Ping Sonar is housed in a rugged hard-anodized aluminum enclosure with a 1 meter (3.3 feet) cable and a pre-installed WetLink Penetrator. It has four threaded mounting holes and comes with a mounting bracket and hardware for easy installation on the BlueROV2. The included header pin to JST GH adapter makes it easy to plug into the USB to Serial and RS485 Adapter.
Using the Ping
The Ping can be connected to a microcontroller device, such as an Arduino, or to a computer through a BLUART USB to Serial adapter.
Once connected, we recommend getting started with Ping Viewer, an open-source application developed specifically for Ping devices. Ping Viewer makes it easy to view the output, record data, and change settings on the Ping and runs on Windows, Mac, and Linux. The Ping Sonar can be connected to Ping Viewer directly or over a network connection routed through BlueOS, so that you can use the Ping on the ROV without using any additional wires in the tether.
For those who wish to integrate the Ping Sonar into other systems, it communicates with a binary message format called Ping Protocol. We’ve made C++, Arduino, and Python development libraries for Ping Protocol to get you up and running almost immediately.

Product Description
The Ping Sonar is a multipurpose single beam echosounder. It can be used as an altimeter for ROVs and AUVs, for bathymetry work aboard a USV, obstacle avoidance on autonomous vehicles, and other underwater distance measurement applications. The Ping Sonar combines a compact form factor and 300 meter depth rating with an open-source software to create a powerful new tool for marine robotics!
What is a Single Beam Echosounder?
An echosounder, like the Ping Sonar, is one of the simplest forms of underwater sonar. It operates by using a piezoelectric transducer to send an ultrasonic acoustic pulse into the water and then listens back for echoes to return. With that information, it can determine the distance to the strongest echo, which is usually the ocean floor or a large object. It can also provide the full echo response (echo strength versus time) which can be plotted like the display of a fishfinder sonar.
Designed for the Depths
The Ping Sonar uses a 115 kHz transducer frequency, away from those used on most boat echosounders to avoid interference. It has a measurement range of 100 meters (328 feet) and a measurement beamwidth of 25 degrees, perfect for applications on a rocking boat or for obstacle avoidance. An advanced bottom-tracking algorithm runs on the device to determine the distance to the seafloor, even in complicated situations with multiple echoes.
The Ping Sonar is housed in a rugged hard-anodized aluminum enclosure with a 1 meter (3.3 feet) cable and a pre-installed WetLink Penetrator. It has four threaded mounting holes and comes with a mounting bracket and hardware for easy installation on the BlueROV2. The included header pin to JST GH adapter makes it easy to plug into the USB to Serial and RS485 Adapter.
Using the Ping
The Ping can be connected to a microcontroller device, such as an Arduino, or to a computer through a BLUART USB to Serial adapter.
Once connected, we recommend getting started with Ping Viewer, an open-source application developed specifically for Ping devices. Ping Viewer makes it easy to view the output, record data, and change settings on the Ping and runs on Windows, Mac, and Linux. The Ping Sonar can be connected to Ping Viewer directly or over a network connection routed through BlueOS, so that you can use the Ping on the ROV without using any additional wires in the tether.
For those who wish to integrate the Ping Sonar into other systems, it communicates with a binary message format called Ping Protocol. We’ve made C++, Arduino, and Python development libraries for Ping Protocol to get you up and running almost immediately.
- 1 x Ping Sonar
- 1 x Ping Sonar mounting bracket (BR-100123)
- 1 x 4 position female header to 6 position JST GH cable adapter (BR-100112)
- 4 x M3x5 button head cap screws (BR-100689)
- 2 x M5x16 button head cap screws (BR-101091)
- 1 x M10 bulkhead O-ring
- 1 x M10 bulkhead nut (BR-100338)
Specifications
| Parameter | Value | |
|---|---|---|
| Electrical | ||
| Supply Voltage | 4.5–5.5 V | |
| Logic Level Voltage | 3.3 V (5 V tolerant) | |
| Current Draw | 100 mA (typical) 900 mA (peak) |
|
| Communication | ||
| Signal Protocol | TTL Serial (UART) | |
| Available Firmware Baud Rates | 115200 bps (default) 9600 bps |
|
| Message Protocol | Ping Protocol | |
| Message Subsets | common, ping1d | |
| Software Development Libraries | Arduino ArduPilot (limited) C++ Python Rust |
|
| Cable | ||
| Cable Used | BR-100452 | |
| Cable Length | 875 mm | 34.5 in |
| Maximum Cable Length | 8 m | 26 ft |
| Conductor Gauge | 24 AWG | |
| Wires | Black Red White Green | Ground Vin TX (out) RX (in) |
| Installed Penetrators | ||
| Device Side | M06-4.5mm-LC | |
| Cable End | M10-4.5mm-LC | |
| Acoustics | ||
| Frequency | 115 kHz | |
| Source Level | 198 dB re 1 uPa @ 1 m | |
| Beamwidth (-3 dB from peak) | 25 degrees | |
| Typical Minimum Range | 0.3 m | 1 ft |
| Typical Usable Range¹ | 100 m | 328 ft |
| Range Resolution | 0.5% of range | |
| Range Resolution at 100 m (waterfall range, not measured range) | 50 cm | 19.7 in |
| Range Resolution at 2 m (waterfall range, not measured range) | 1 cm | 0.4 in |
| Physical | ||
| Depth Rating | 300 m | 984 ft |
| Temperature Range | 0–30°C | 32–86°F |
| Weight in Air (w/ cable) | 187 g | 0.41 lb |
| Weight in Water (w/ cable) | 100 g | 0.22 lb |
| Mounting Bracket Screw Size | M5x16 mm | |
| Internals | ||
| Air Chamber O-Ring | AS568-030, Buna-N, 70A | |
| ¹ Usable range depends on operating conditions (e.g. performance may suffer over variable density changes from tall vegetation, groups of fish, geysers, etc). | ||
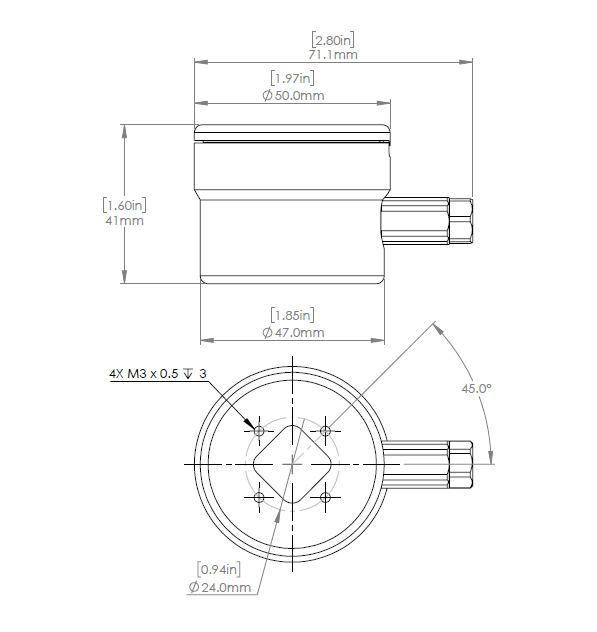
2D Drawings
Ping Sonar
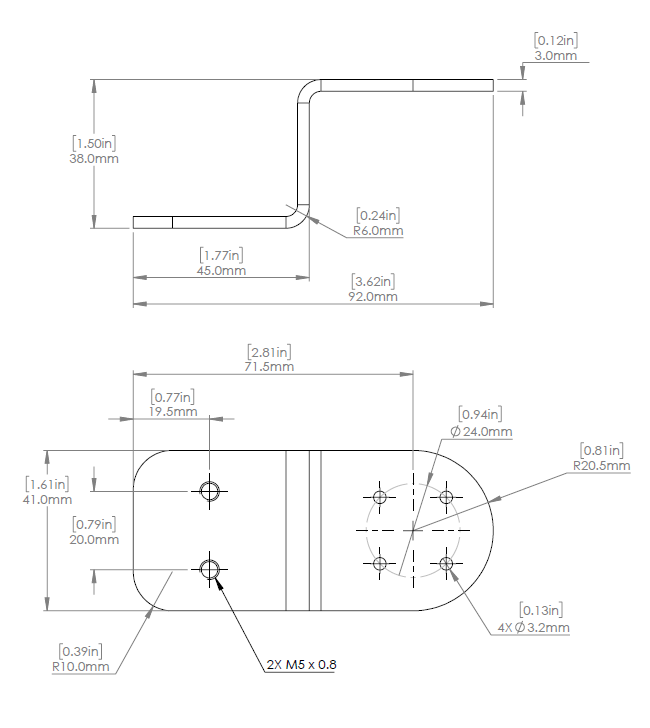
Ping Mount
3D Models
PING_SONAR_BR-100725_RevA_PUBLIC (.zip)
PING_MOUNT_BR-100123_RevA_PUBLIC (.zip)
Documents
Ping Sonar Firmware Files (GitHub)
Original Ping Sonar Firmware Files (GitHub)
Device Recovery Process (Ping Viewer docs)
Revision History
4 May 2023
- BR-101684 RevB – Initial release
- Updated Ping Sonar to pottingless design
- Changed to narrower, 25° beamwidth
- Increased typical usable range to 100 meters
- Larger external dimensions
- Ping mounting bracket updated to fit larger Ping diameter
13 April 2023
- Bulkhead O-ring color changed to blue
4 October 2021
- R3 – Initial release
- Updated pre-installed penetrators to WetLink Penetrators
23 July 2021
- Typical usable range value extended from 30m to 50m based on follow-on usage and variability testing
29 January 2019
- R2 – Initial release
Quick Start
Connecting Ping To a Computer
1. Download Ping Viewer for your operating system.
2. Plug the male header pins from the Ping sonar cable into the female header to JST GH cable adapter. Match the colors of all the wires, red to red, black to black, green to green, and white to white.
3. Plug the 6-position JST GH plug into the serial JST GH receptacle on the BLUART adapter.
4. Plug the BLUART into the computer using a Micro-USB to USB-A Cable.
5. Start Ping Viewer, it should automatically detect the connected Ping Sonar and display it in the device manager menu.
6. Select the Ping from the device manager menu and the waterfall display should automatically start. If there are issues with establishing a connection, please check our Ping Viewer troubleshooting steps.
Guides
Ping Sonar Technical Manual
Learn about the advanced functionality of the Ping Sonar!
Ping Installation Guide for the BlueROV2
This guide will show you how to install a Ping sonar on your BlueROV2 to view your altitude above the seafloor!

Using the Ping Sonar with an Arduino
Learn how to connect a Ping to an Arduino and get distance readings in the Serial Monitor.
Ping Integration Kit for BlueBoat Installation Guide
Learn how to mount a Ping Echosounder to the BlueBoat using the Ping Integration Kit for BlueBoat.

Collecting and Creating Bathymetric Maps with the BlueBoat and Ping
Learn to collect, filter, and visualize bathymetry data collected with the Blue Robotics BlueBoat and Ping2 single beam sonar!

Ping Sonar Repair Guide
Learn how to repair your Ping Sonar Altimeter and Echosounder.