The Newton Subsea Gripper is a single function manipulator for the BlueROV2 and other subsea vehicles. It’s the result of several years of effort starting with a senior project in 2016 and evolving into the current design over several iterations. Each element was carefully designed and combined to create an awesome ROV tool.
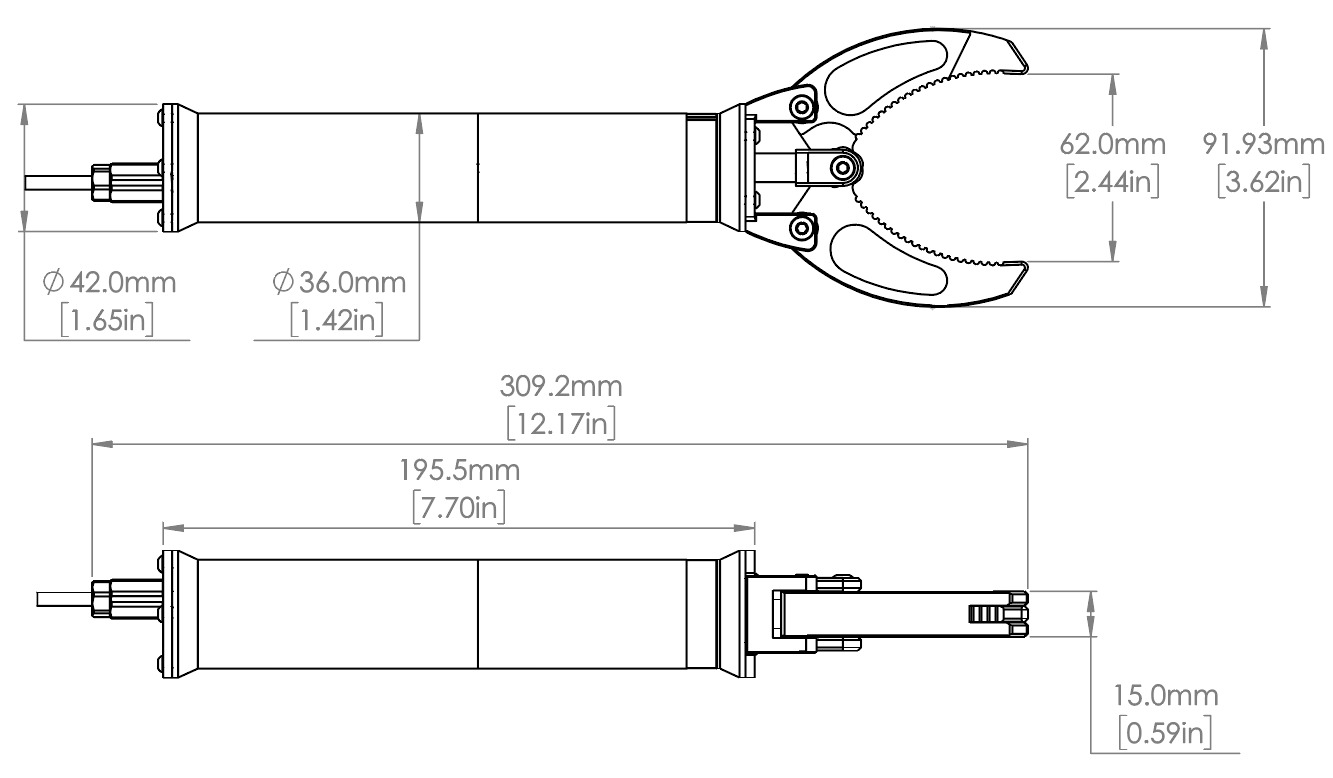
The gripper has jaws that open to grab objects up to 2.44″ or 6.2cm in diameter. The plastic jaws are mounted with custom aluminum screws to create a corrosion resistant mechanism that doesn’t need any lubrication. The jaws are driven by a linear actuator that uses a geared brushed motor and lead screw. The main body is air-filled and sealed with O-rings. We’ve spent a lot of time testing it at pressure and it’s rated to 300m depth with plenty of safety factor.