The BarXT pressure sensor series is designed for underwater applications where sensors need to remain submerged for extended periods without maintenance. They’re ideal for ROVs, AUVs, and other subsea instrumentation in long-term deployments where reliability is important.
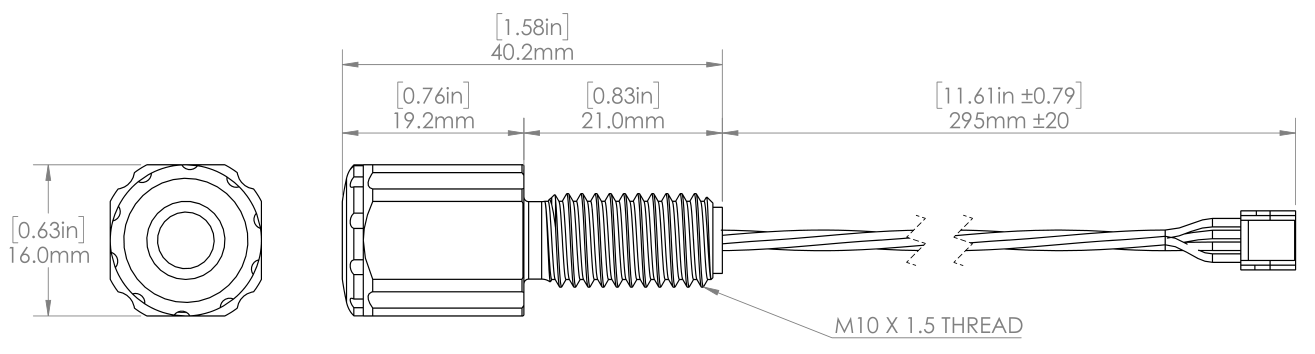
BarXT sensors use the M10 bulkhead penetrator form factor machined from 316 stainless steel, coated with black oxide to reduce galvanic corrosion, and feature a front cover that protects the sensing element from physical damage. BarXT is built to handle harsh marine environments and extended missions.
The BarXT line uses the Keller 4LD series sealed pressure and temperature sensor, and includes four models to cover a range of depths and resolutions:
| Model | Operating Range | Approximate Depth | Resolution |
|---|---|---|---|
| Bar3XT | 0–3 bar | 20 m | 0.091 mbar (0.9 mm) |
| Bar10XT | 0–10 bar | 100 m | 0.31 mbar (3.12 mm) |
| Bar30XT | 0–30 bar | 300 m | 0.92 mbar (9.36 mm) |
| Bar100XT | 0–100 bar | 1000 m | 3 mbar (31 mm) |