
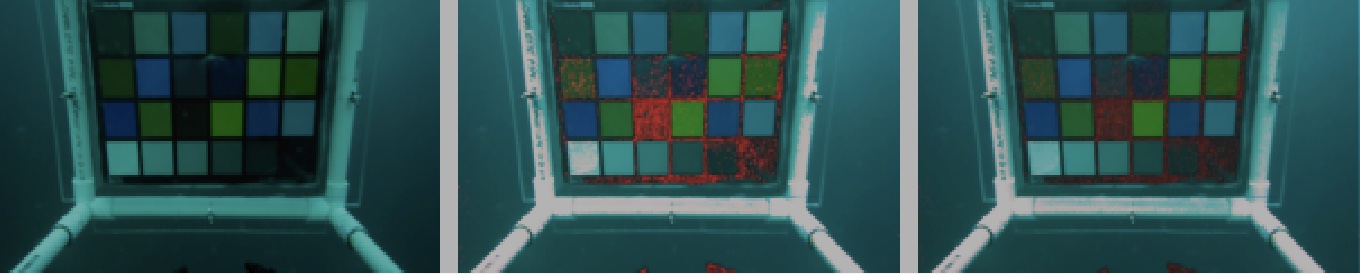
High quality underwater images are important when reconstructing realistic underwater structures, evaluating the health of coral reefs, or navigating underwater….
High quality underwater images are important when reconstructing realistic underwater structures, evaluating the health of coral reefs, or navigating underwater….

Clean water for both drinking and irrigation is a necessary resource, but has little protection. There are regular incidents where…
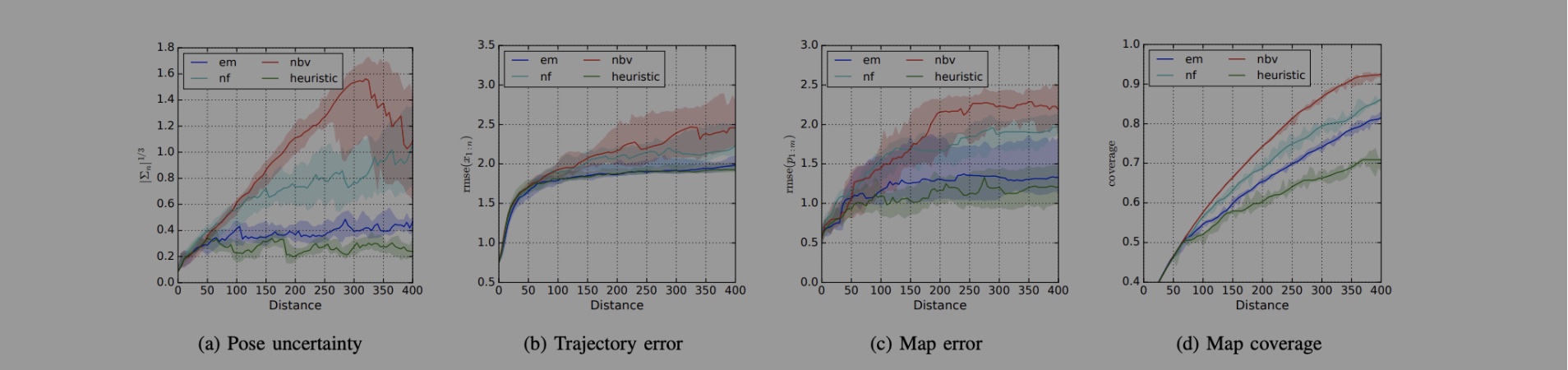
Having an autonomous vehicle actively map an unknown environment is a difficult task and improving this capability would be extremely…
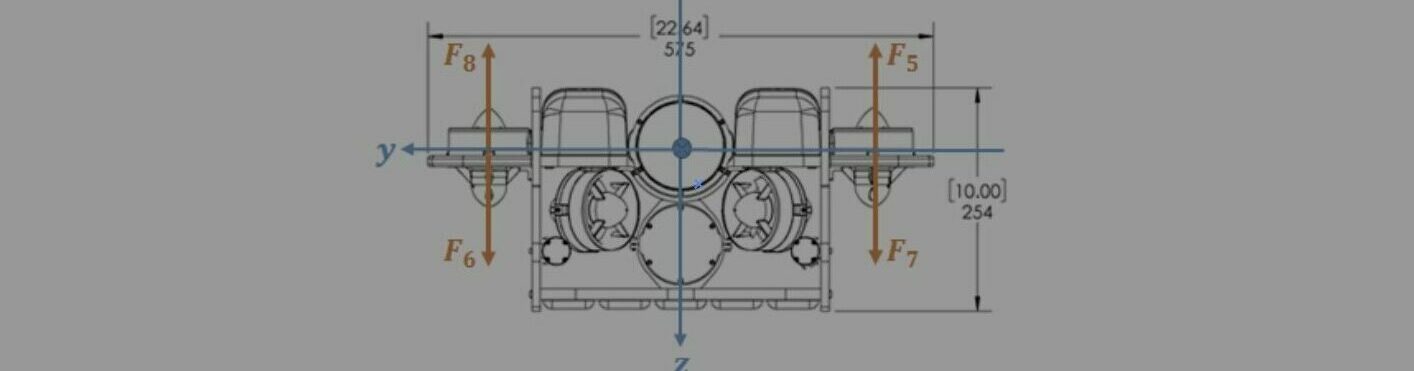
In order for ROVs to operate effectively in a range of applications, they need accurate navigation and control systems for…
Due to the lack of Magnetic Induction (MI) field tests in underwater environments, the authors use a Remotely Operated Vehicle…
We want to see your creativity shine and are challenging YOU to design a vehicle featuring the new T500 Thruster…
Abrasion is a powerful erosion force that shapes our landscapes. While stream-driven abrasion has been extensively studied in the lab,…
AUVs are often used for data-gathering applications, but there is an increasing interest for their use in inspection, maintenance, and…

Faults and degradations, such as sensor failures, software malfunctions, actuators degradations, etc., can happen anytime and anywhere in a system….

Standard monitoring activities are functional for longer time and spatial scales but can be expensive, complex, and inaccurate in certain…