Marine Vehicle Characterization and Implementing Various Levels of AutonomyNg, P.To make piloting ROVs easier, researchers at the University of Hawai’i created an augmented/virtual reality interface and a hybrid autopilot…
BlueME: Robust Underwater Robot-to-Robot Communication Using Compact Magnetoelectric AntennasTalebi, M.; Mahmud, S.In this study, BlueME, a compact magnetoelectric (ME) antenna array system for underwater robot-to-robot communication, is deployed on the BlueBoat…
Use of an uncrewed surface vehicle and near infrared hyperspectral imaging for sampling and analysis of aquatic microplasticsFaltynkova, A.; Deschênes, C.E.Collecting environmental data on microplastics is critical, but challenging. In this study, researchers use an uncrewed surface vehicle (USV) and…
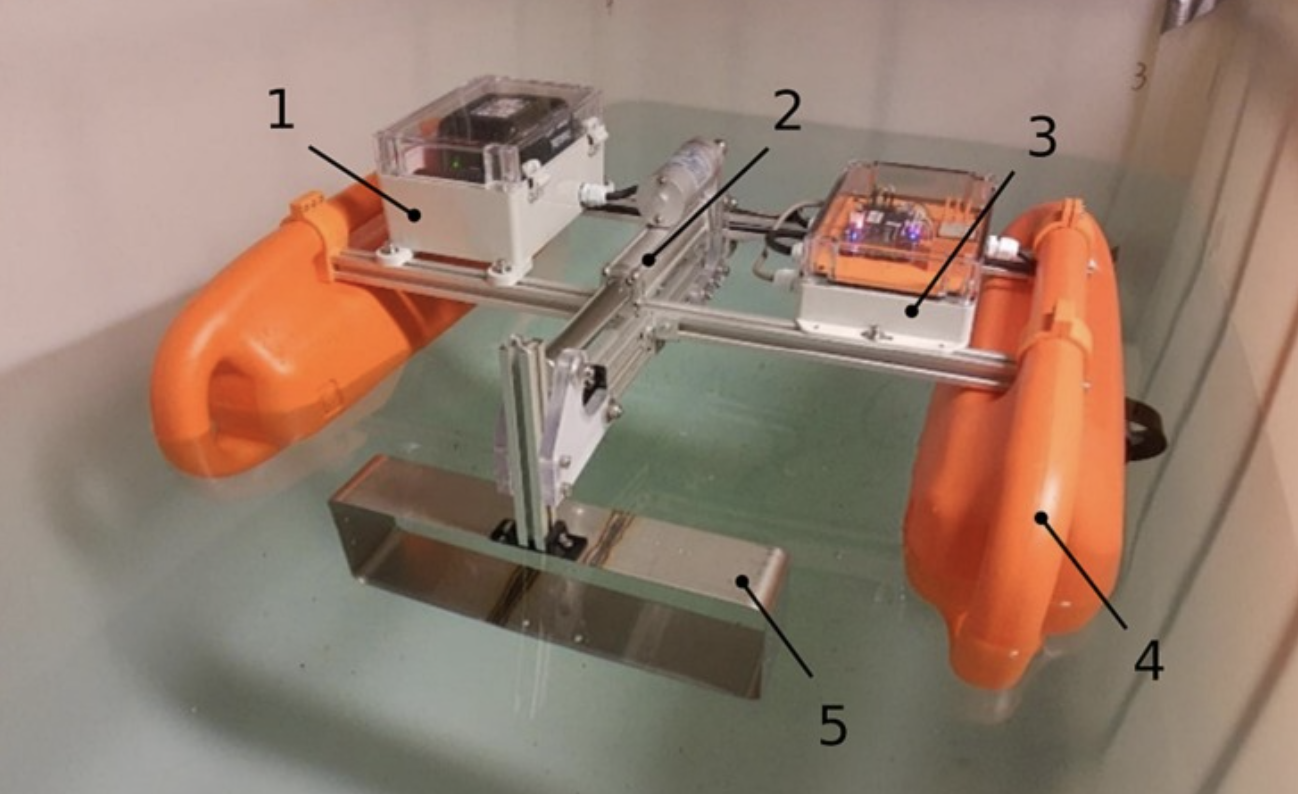
Portable Catamaran Drone – an uncrewed sampling vehicle for micro-plastics and aquaculture researchZolich, A.; Faltynkova, A.One of the most common methods for surface water particle collection (for micro-plastics, plankton, or zooplankton research) is a manta-trawl,…
“Scouring for Prehistory”—An Opportunistic Methodology for Sea Floor ArchaeologyGarrison , E. G.; Carter Jones, E.Decades of attempts to locate prehistoric sites on the sea floor have proven fairly unsuccessful. Here, the authors attempt new…
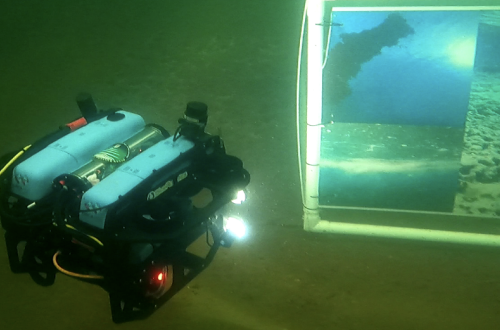
Review and Enhancement of Remotely Operated Vehicles for Marine Pest Surveillance: Phase 2 Project ReportEllard, K.The Tasmanian ROV Project, which explored the utilization of observation-class ROVs for marine pest surveillance programs, was completed in two…
Review and Enhancement of Remotely Operated Vehicles for Marine Pest Surveillance Project ReportEllard, K.ROVs are important tools for marine pest surveillance programs. In this report, the author explores observation-class ROVs and explores how…
Autonomous Lionfish HarvesterLombardi, J.; Godsey, W.Lionfish are indiscriminate predators with few to no predators of their own in the Caribbean region. In this paper, the…
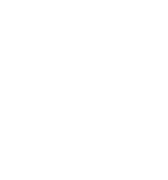
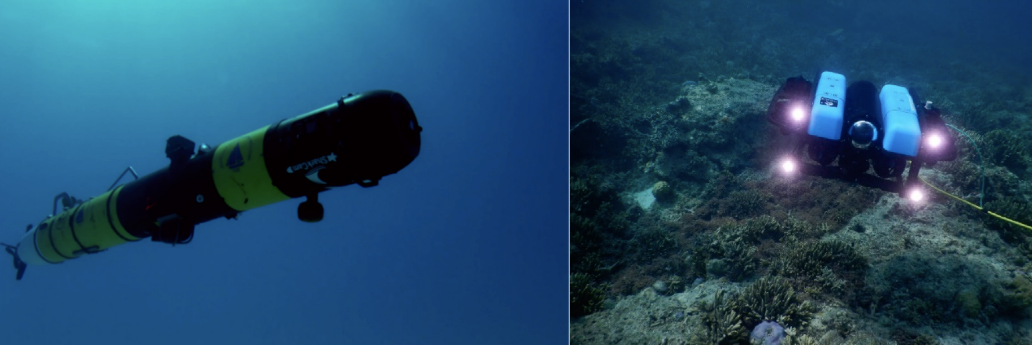
From Market-Ready ROVs to Low-Cost AUVsScharff Willnersb, J.; Carluchoa, I.AUVs are increasing in popularity and can be used for various applications, but tend to be super expensive. In this…
The Drone Revolution of Shark Science: A ReviewButcher, P. A.; Colefax, A. P.Drones are everywhere these days and have endless uses. One application that is increasing in popularity is wildlife management. In…