
In this paper, the authors explore the use of Simulink, a MATLAB-based graphical programming environment for modeling, simulating, and analyzing multidomain dynamical systems, to create a simulation model environment for the BlueROV2.
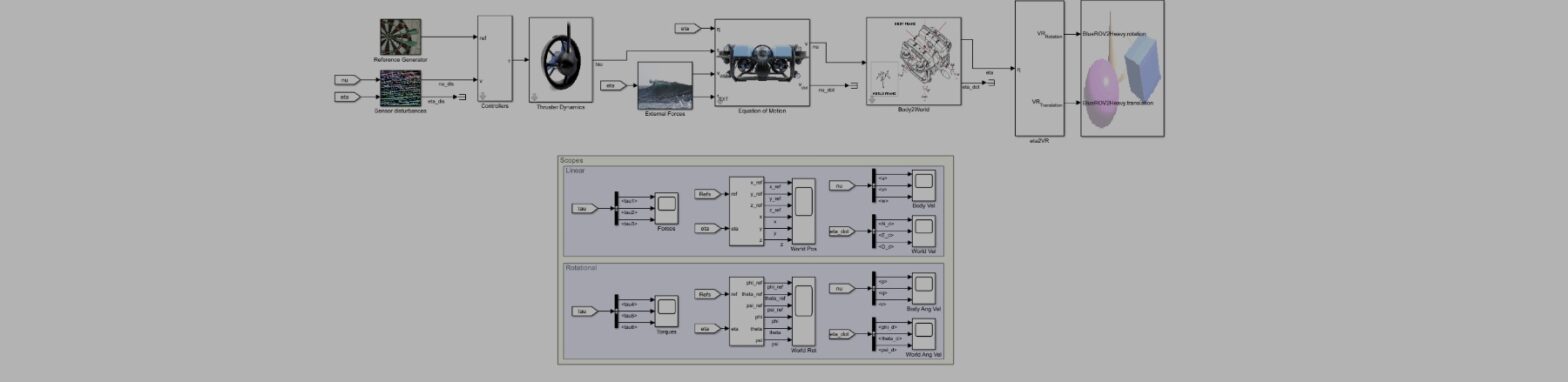
Abstract: This paper presents a simulation model environment for the popular and low-cost remotely operated vehicle (ROV) BlueROV2 implemented in Simulink™ which has been designed and experimentally validated for benchmark control algorithms for underwater vehicles. The BlueROV2 model is based on Fossen’s equations and includes a kinematic model of the vehicle, the hydrodynamics of vehicle and water interaction, a dynamic model of the thrusters, and, lastly, the gravitational/buoyant forces. The hydrodynamic parameters and thruster model have been validated in a test facility. The benchmark model also includes the ocean current, modeled as constant velocity. The tether connecting the ROV to the top-site facility has been modeled using the lumped mass method and is implemented as a force input to the ROV model. At last, to show the usefulness of the benchmark model, a case study is presented where a BlueROV2 is deployed to inspect an offshore monopile structure. The case study uses a sliding mode controller designed for the BlueROV2. The controller fulfills the design criteria defined for the case study by following the provided trajectory with a low error. It is concluded that the simulator establishes a benchmark for future control schemes for position control and trajectory tracking under the influence of environmental disturbances.
Author: von Benzon, M.; Fogh Sørensen, F.; Uth, E.; Jouffroy, J.; Liniger, J.; Pedersen, S.
Journal: Journal of Marine Science and Engineering
To read more, click here!