This is the updated version of our Ping sonar! It’s very similar to the original Ping but has an increased range to 100 meters and an improved physical design!
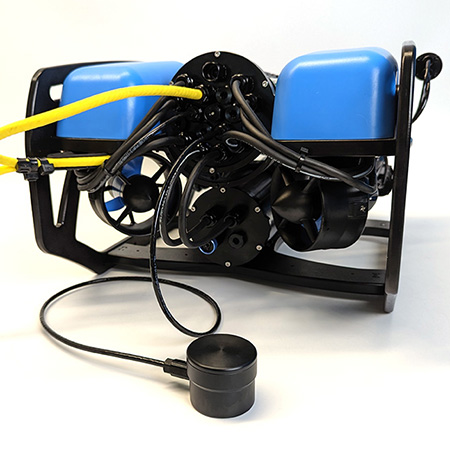
The Ping sonar is a multipurpose single-beam echosounder. It can be used as an altimeter for ROVs and AUVs, for bathymetry work aboard a USV, as an obstacle avoidance sonar, and other underwater distance measurement applications. Ping combines a compact form factor and 300 meter depth rating with an open-source user interface and Arduino, C++, and Python development libraries to create a powerful new tool for marine robotics!
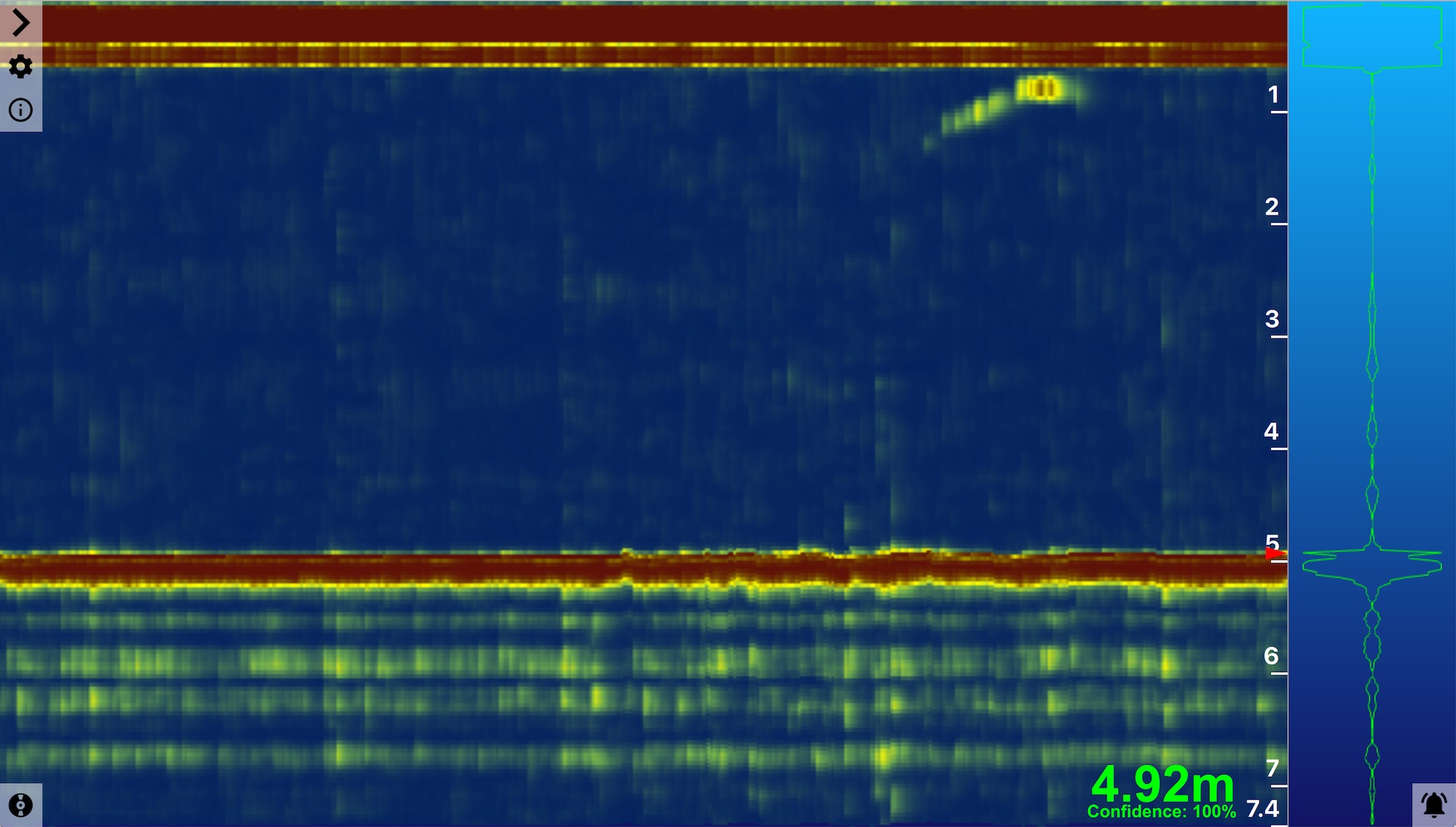
An echosounder, like the Ping, is one of the simplest forms of underwater sonar. It operates by using a piezoelectric transducer to send an ultrasonic acoustic pulse into the water and then listens back for echoes to return. With that information, it’s able to determine the distance to the strongest echo, which is usually the ocean floor or a large object. It can also provide the full echo response (echo strength versus time) which can be plotted like the display of a fishfinder sonar.
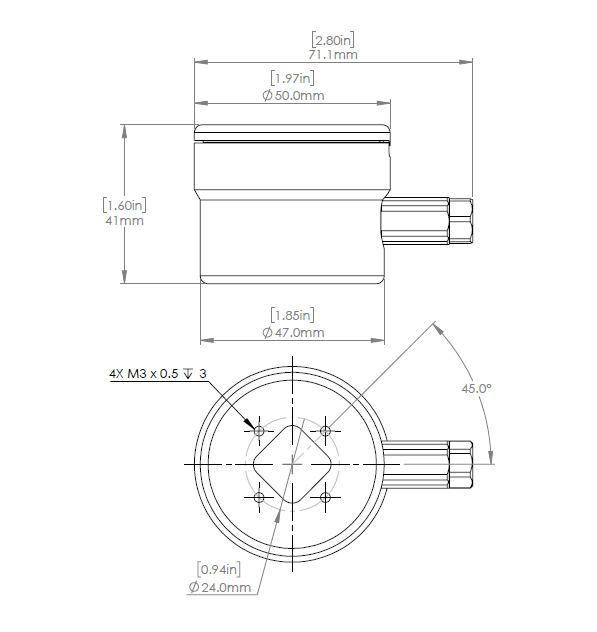
The Ping uses a 115 kHz transducer frequency, away from those used on most boat echosounders to avoid interference. It has a measurement range of 100 meters (328 feet) and a measurement beamwidth of 25 degrees, perfect for applications on a rocking boat or for obstacle avoidance. An advanced bottom-tracking algorithm runs on the device to determine the distance to the seafloor, even in complicated situations with multiple echoes.