

November 21, 2022 | Mark Fairchild
Are you a graduate student or working professional for whom an autonomous underwater vehicle (AUV), remotely operated underwater vehicle (ROV), or uncrewed surface vehicle (USV) would be useful, and yet you’re unfamiliar with the available options? If so, you’ve come to the right place!
Aquatic vehicles that don’t require a crew or onboard pilot come in a variety of shapes and sizes, determined mainly by the intended application. From small and portable remotely operated vehicles to large, uncrewed surface vessels, there is an uncrewed surface vehicle (USV) or autonomous underwater vehicle (AUV) for every need and budget.
So, what are the different types of AUVs, ROVs, and USVs available and what do they each have to offer?
What follows is a breakdown of the most common types of uncrewed marine vehicles you’ll find on the market. We take a look at three broad categories: Uncrewed Surface Vehicles (USVs), Autonomous Underwater Vehicles (AUVs), and Remotely Operated Underwater Vehicles (ROVs). The applications for each type are examined, and we also give an overview of some of the common payloads like sensors, manipulators, and navigational equipment.

USV designed by Bastiaan Tomassen, Seaber's Yuco AUV, and JM Robotics' JM HD3 ROV.
We will bypass military applications in this article and instead concentrate on academic and commercial uses.
Uncrewed Surface Vehicles (USVs)
First, a note about terminology: vessel and vehicle are used interchangeably when talking about USVs and you’ll hear the terms autonomous and uncrewed in addition to uncrewed. Some people like the term drone ships. “Surface” vessel means the vehicle travels on top of the water rather than underneath the surface, i.e. a boat rather than a submarine.

SubNero's SWANBot, a solution that automates the process of water quality monitoring.
Levels of Autonomy
USVs have varying levels of autonomy that range from being remotely controlled by a human pilot, to semi-autonomous obstacle avoidance, to completely autonomous navigation of a route from beginning to end. Some USVs offer all three levels of autonomy.
While operating autonomously, most USVs can have their route updated and changed remotely.
A Few Notes on Communication with USVs
Communication with uncrewed surface vehicles encompasses many possibilities. A full discussion is beyond the scope of this article, but here are a few observations. If the USV operates on a river or lake, radio frequency (RF) communications work well and the cellular network might be employed. The same can be said for vehicles operating in the ocean relatively close to shore (within maybe 25 miles.) If one is far out at sea, or on large bodies of water like the Great Lakes, satellite communications will be required.

BR and JM Robotics humans remotely controlling a USV.
Communication with uncrewed surface vehicles is application dependent. For research needs, real time data may not be necessary. A USV on a scientific mission can gather measurements and store the data onboard, waiting until the vessel is retrieved to gather the information gained.
Remotely piloted search and rescue operations require real time data and will need high quality, low latency communication capability. Delivery and salvage missions may or may not need high bandwidth, real time data to be fed back to the operator on shore.
Small USVs
Smaller vessels, perhaps less than ten feet long, are generally intended for research and data collection. These vehicles often have sensors above and below the water allowing them to make measurements. Weather research might need instruments for temperature, wind speed, barometric pressure, and cloud height, while oceanographic measurements can include wave height and period, tide measurement, sea conductivity and salinity, and ocean current. Bathymetric measurements will use sonar and Doppler Velocity Logger (DVL) devices.
Smaller vehicles will tend to have electric motors for their propulsion, with batteries as an included component. Some offer a diesel-electric system for longer missions (maybe a week) or solar panels for even lengthier voyages (perhaps a month or more).

Smart Drifter Cariddi, designed by MDM Team.
Medium-Sized USVs
Uncrewed surface vehicles in the ten to thirty feet long range could be considered medium-sized. USVs in this class are multi-purpose. Applications include scientific research and commercial uses. One business example is an autonomous delivery boat that crosses the Long Island Sound and brings premium fresh fish and other cargo to customers in a very cost-effective manner.
Larger and Really Big
Larger vehicles would include anything longer than thirty feet, up to and including super tankers. Autonomous navigation of large ocean-going vessels is almost a commercial reality. “Almost” means the technology is more or less there, but regulations restrict its use. Rigorous testing and refinement are still needed, similar to the situation with self-driving cars.
Autonomous Underwater Vehicles (AUVs)
Autonomous Underwater Vehicles (AUVs) can run an underwater mission without human intervention. They can follow a predetermined route, and even have some limited decision-making capability. An example is pipeline inspection, in which some AUVs can automatically find a pipeline and follow it. The AUV can video the pipeline in high resolution and avoid some obstacles while doing so.
Form Factor
As with Uncrewed Surface Vehicles, (and most other things, too) form follows function. That is, the size and shape of autonomous underwater vehicles (AUVs) are mostly determined by the intended use.
Many, but not all AUVs come in a cylindrical shape, similar to a torpedo or submarine. Many other shapes are possible, if less common.

YUCO AUVs, designed by SEABER.
Propulsion
Most AUVs use electric motors for propulsion called thrusters. Larger vehicles might use hydraulic thrusters. At least six thrusters are required to provide all six degrees-of-freedom (surge, heave, sway, roll, pitch, and yaw).
Depth
AUVs can dive much deeper than human scuba divers, who can generally only go to a maximum depth of about 100 meters. Depending on the model, AUVs can go to depths of 5000 meters or more.
Operational Duration
The battery capacity and mode of operation will determine how long an AUV can operate before recharging, with typical numbers being in the range of hours. Some AUVs offer special low-power “gliding” modes that can extend their operating time to days.
Communicating with AUVs
Radio waves do not propagate well through water. Acoustic waves are the most common form of communication underwater, yet this method suffers from low data rates (typically less than several kilobytes per second) and limited range (usually less than 20 km.) As a consequence, autonomous underwater vehicles are not well suited for applications that require real-time data like streaming video.
Ongoing research into underwater communication technologies may someday overcome this limitation.
AUV Instrumentation
AUVs most often carry sonar, and sometimes lights and cameras, along with other equipment relevant to their mission. Sonar for mapping the ocean floor is a common AUV payload.
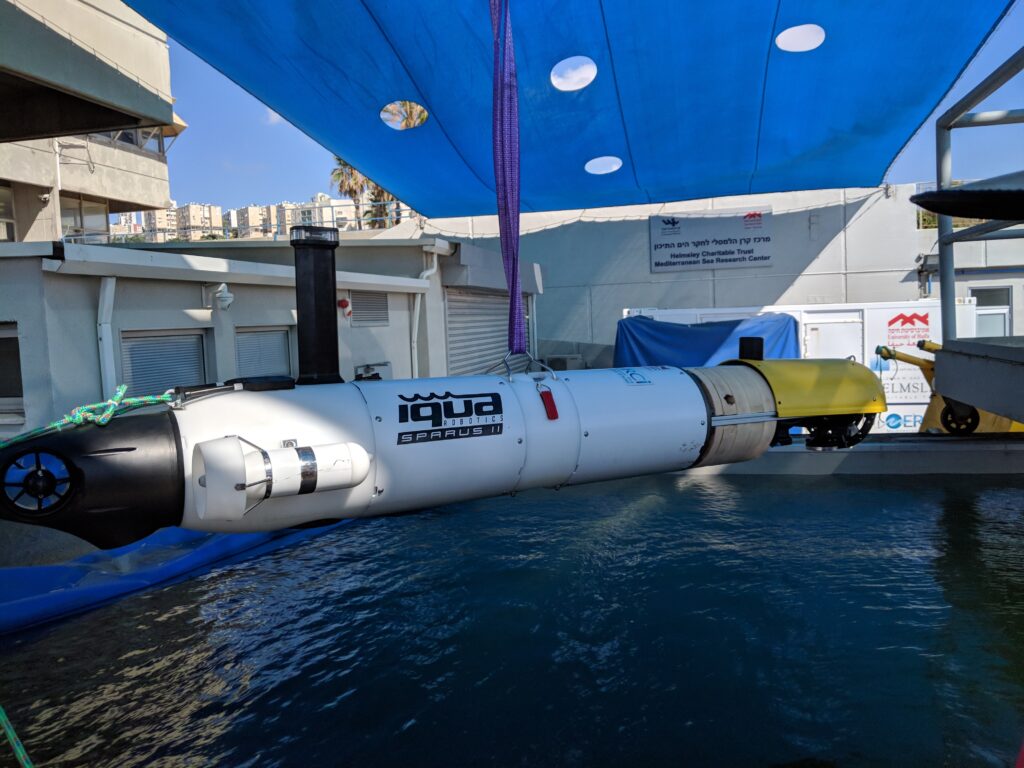
Sparus II AUV, designed by Iqua Robotics.
Applications of AUVs
AUVs are a good fit for applications like mapping the ocean floor or inspection because the vehicle can gather the data and report its findings once it surfaces. They are not the device to use if the task involves complicated maneuvering and real-time decision making.
Underwater Navigation
AUVs cannot navigate using GPS while underwater. Instead, the vehicles most often use Doppler Velocity Logger (DVL) navigational technology. The DVL method is based on calculating velocity and direction, using four acoustic beams. Accuracy using this method is generally reasonable, depending on the application. Other methods are possible, and as technology advances, navigation of AUVs continues to improve by integrating multiple measurements and sensors.
Docking
Underwater docking stations make it possible for an AUV to report back its findings and recharge its batteries without needing to surface. An umbilical cord connects the docking station to a surface vessel and provides data communication and power for recharging.
Remotely Operated Vehicles (ROVs)
Underwater ROVs are controlled by human pilots usually located on land or in a surface vessel. A tether or umbilical cord provides high bandwidth communication with the ROV, enabling high-quality, real-time video signal to be seen by the pilot. The tether also supplies control signals and can provide power, although many ROVs carry their power onboard in the form of batteries.
ROVs range in size from something rather tiny like a remotely controlled model car (maybe six inches long or even smaller), to vehicles the size of a car – like a sport utility vehicle (SUV). We will focus on ROVs in the intermediate size, perhaps one to five feet long.
Tethers can be quite long, in the range of several kilometers, although long cables require large and powerful spooling equipment.
Form Factor
Most ROVs employ an open rectangular frame that makes it easy to build, and also facilitates attaching additional instruments and equipment. Other forms are sometimes used to reduce drag, improve appearance, or perform a special mission.

The uniquely shaped UX-1Neo at work in Kobanya mine!
Propulsion
Most ROVs use electric thrusters, although hydraulic thrusters can be used. As noted before with UUVs, at least six thrusters are needed to provide all six degrees of freedom of motion.
Depth
ROVs can dive quite deep (thousands of meters), depending on the materials used and design parameters that would enable the unit to withstand deep water pressures, as well as the length of the tethers. Most ROVs in the intermediate to small size typically operate to a maximum depth of between 50 and 300 meters.
Operational Duration
If the ROV is battery powered, it may have the same limitations as UUVs regarding how long it can operate before needing to be recharged. However, since there is a tether, if the design of the ROV allows the cable to supply power, then that operational duration restriction is removed.
Communication with ROVs
Because of the tether, an ROV is in constant communication with the pilot. The ROV delivers a high-quality, real-time video feed to the pilot, who uses this to guide the submersible.
ROV Possible and Common Payloads
Lights and video camera are needed for navigation, so they are always part of an ROV. Sunlight does not penetrate very deeply into water – rarely is there any significant light deeper than 200 meters.

The Crawler ROV, designed by Aqua Exploracion.
Controlling an ROV is typically done with something like a joystick used in computer games, most often connected to a computer. An Xbox controller is a good example. Some control stations, especially for bigger ROVs, are quite large and complex, with multiple monitors, and stations for several operators.
Blue Robotics provides a variety of attachments to extend the functionality of an ROV. Here are some of the possibilities:
- Newton Subsea Gripper, allowing the pilot to perform a wide variety of tasks, including attaching recovery lines and retrieving objects
- with the gripper, it’s easy to sample sediment, or collect water samples
- Ping360 Scanning Sonar for navigation and imaging
- Ping Sonar Altimeter and EchoSounder for measuring distance to the ocean floor
- Sonoptix ECHO Multibeam Imaging Sonar for navigation, inspection, and object detection
- Water Linked DVL A50 for position holding and autonomous navigation capabilities
- temperature, depth, and pressure sensors
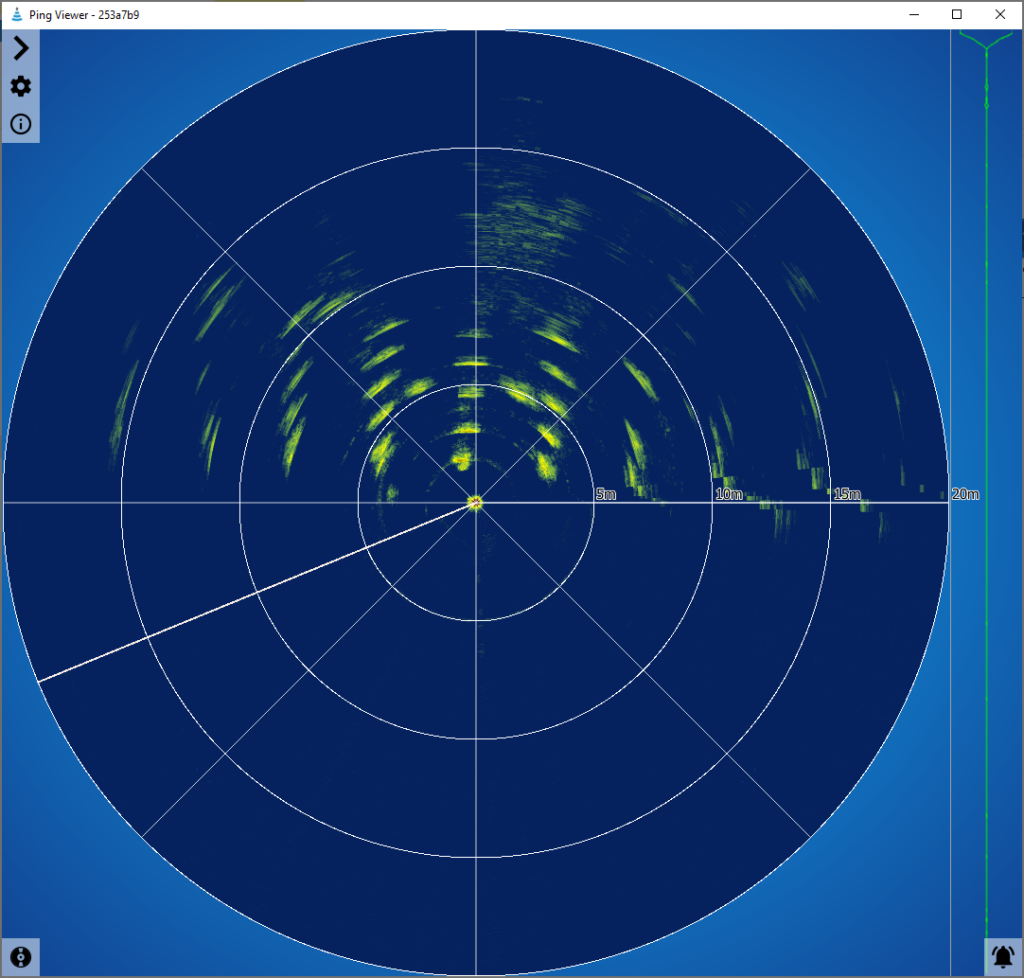
Dock Pilings in front of the BlueROV2, using the Ping360
Applications of ROVs
With a human pilot in the loop, ROVs can perform complex maneuvers. Deepwater industries use ROVs to conduct underwater equipment inspections and map ocean floors. Scientific and academic researchers employ ROVs to learn more about underwater life forms and their environment. Salvage operations deploy ROVs to explore shipwrecks.
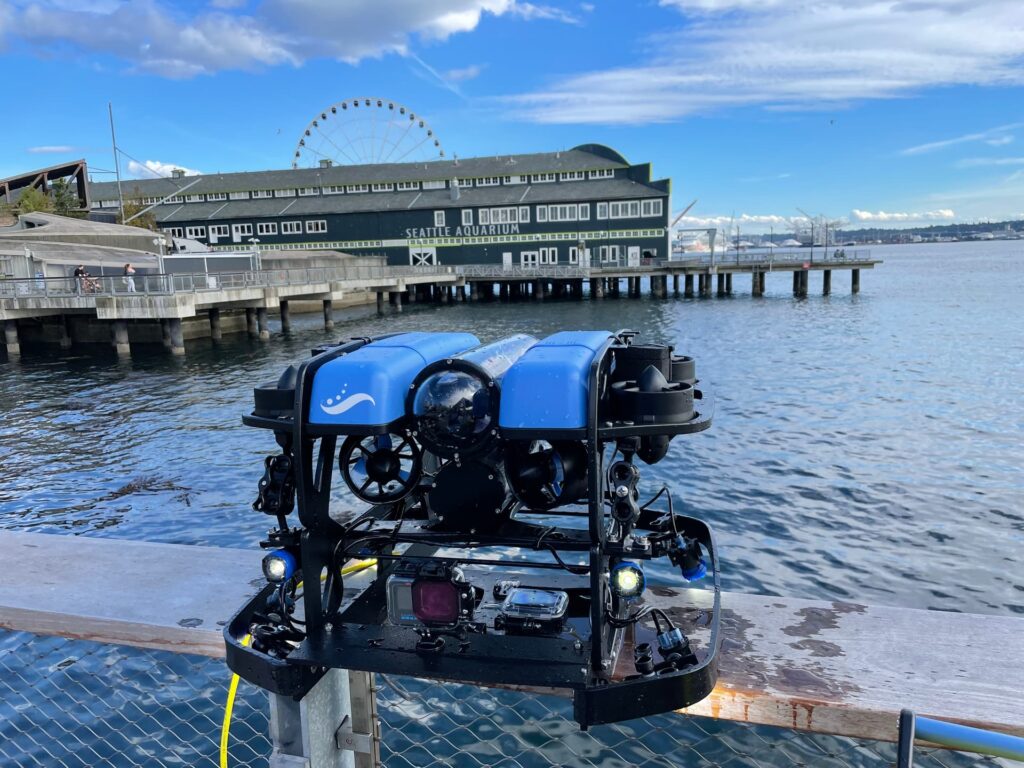
A BlueROV2 customized by The Seattle Aquariam for kelp farming!
As technology has progressed, and inexpensive hardware has become available, more and more applications will become practical.
Blue Robotics offers the BlueROV2, the world’s most affordable high-performance ROV. With a 6-thruster vectored configuration, open-source electronics and software, and plenty of expandability, it’s the perfect ROV for inspections, research, and adventuring.
Conclusion
So there you have a quick overview of the types of uncrewed marine vehicles you might encounter. What kind of vehicle could you employ?
Learn more about the vehicles mentioned in this article!
- SB100 Pro designed by GPA Seabots
- USV designed by Bastiaan Tomassen
- YUCO AUV designed by SEABER
- JM HD3 ROV designed by JM Robotics
- SWANbot USV designed by Subnero
- Smart Drifter Carridi USV designed by MDM Team
- Sparus II AUV designed by Iqua Robotics
- UX-1Neo ROV
- Blue Robotics BlueROV2
- The Crawler ROV designed by Aqua Exploracion