
Underwater vehicles equipped with manipulators are beneficial tools for subsea inspection, maintenance, and repair operations. Higher levels of autonomous vehicles increase the need for higher-quality camera systems and software. In this paper, the authors use a monocular camera to detect an object of interest and then use a manipulator mounted under the vehicle to retrieve the object through a developed kinematic control system.
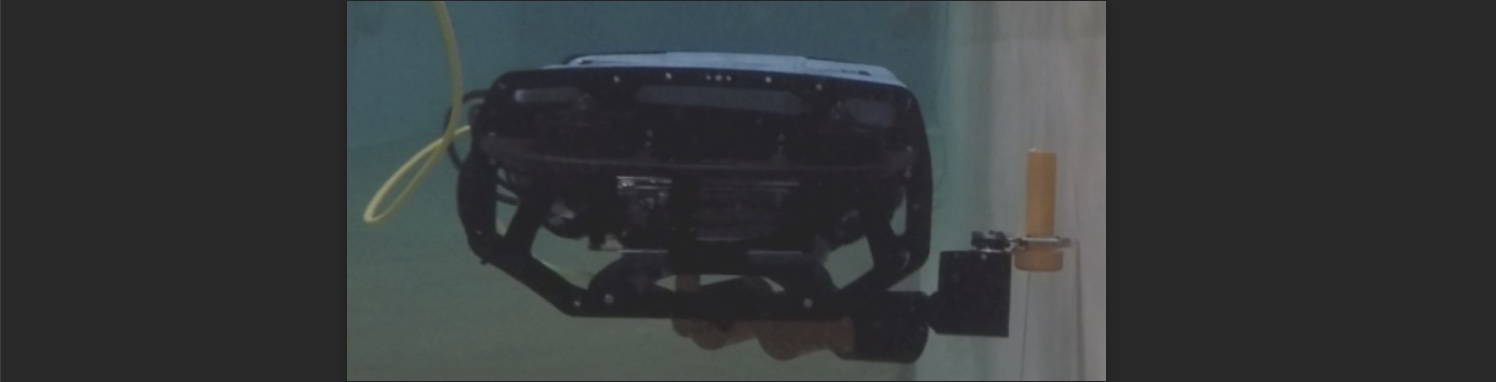
Abstract: Optics-based systems may provide high spatial and temporal resolution for close range object detection in underwater environments. By using a monocular camera on a low cost underwater vehicle manipulator system, objects can be tracked by the vehicle and handled by the manipulator. In this paper, a monocular camera is used to detect an object of interest through object detection. Spatial features of the object are extracted, and a dynamic positioning system is designed for the underwater vehicle in order for it to maintain a desired position relative to the object. A manipulator mounted under the vehicle is used to retrieve the object through a developed kinematic control system. Experimental tests verify the proposed methodology. A stability analysis proves asymptotic stability properties for the chosen sliding mode controller and exponential stability for the task error.
Author: Haugaløkken, B.O. A.; Skaldebø, M. B.; Schjølberg, I.
Journal: Robotics and Autonomous Systems
To read more, click here!