
High quality underwater images are important when reconstructing realistic underwater structures, evaluating the health of coral reefs, or navigating underwater. However, underwater images are more affected by bluriness, distortions, and light attenuation than in-air images. This paper addresses that problem and implements a new color correction method for underwater imaging.
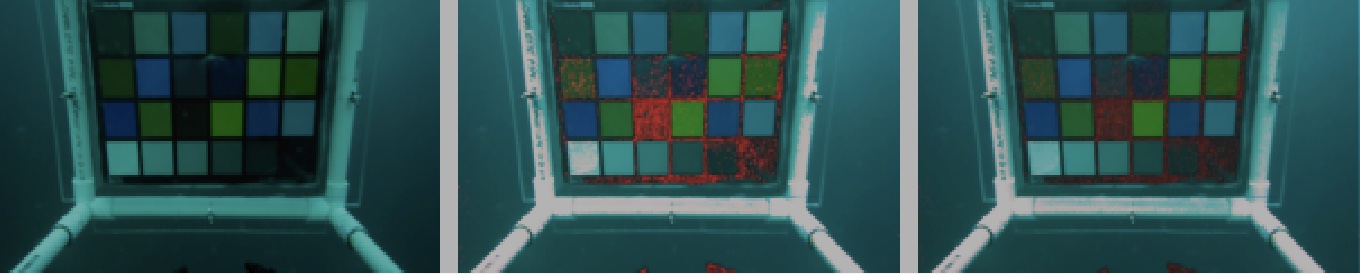
Abstract: Recently, a new underwater imaging formation model presented that the coefficients related to the direct and backscatter transmission signals are dependent on the type of water, camera specifications, water depth, and imaging range. This paper proposes an underwater color correction method that integrates this new model on an underwater robot, using information from a pressure depth sensor for water depth and a visual odometry system for estimating scene distance. Experiments were performed with and without a color chart over coral reefs and a shipwreck in the Caribbean. We demonstrate the performance of our proposed method by comparing it with other statistic-, physic-, and learningbased color correction methods. Applications for our proposed method include improved 3D reconstruction and more robust underwater robot navigation.
Author: Roznere, M.; Quattrini Li, A.
Journal: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
To read more, click here!