Light Guided, Autonomous, and Mobile Underwater Tracking of an Unmanned Underwater Vehicle
Whitaker, C.
Since Unmanned Underwater Vehicles have numerous applications and are affordable, they are used frequently. Accurate position estimation makes UUVs more…
Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles
González-García, J.; Narcizo-Nuci, N.
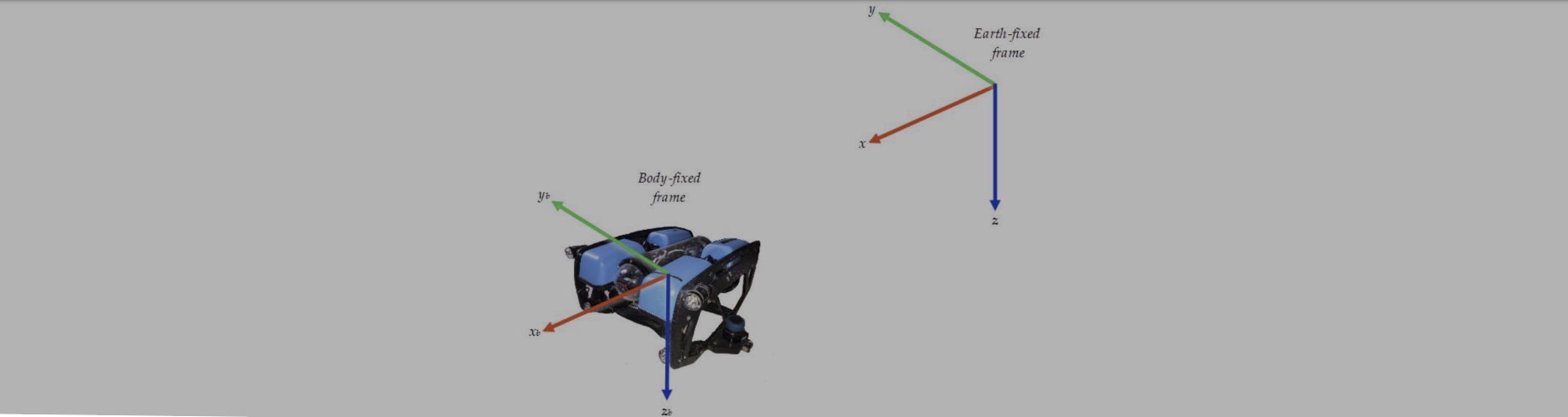
Unmanned Underwater Vehicles are used for numerous applications, but have a tracking problem as their six Degree of Freedom (DOF)…
OysterNet: Enhanced Oyster Detection Using Simulation
Lin, X.; Sanket, N.
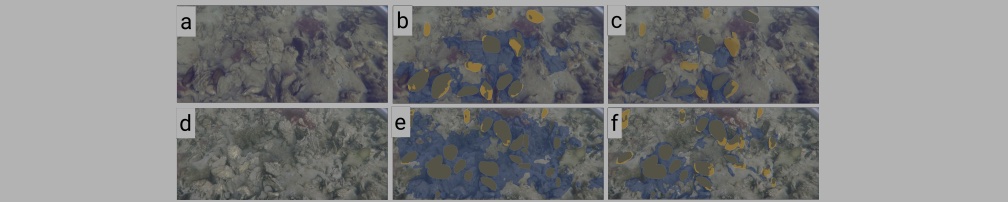
While oysters are crucial to estuary ecosystems, over-harvesting has lead to oyster reef devastation and preservation is necessary. In this…
Development of Low-cost Unmanned Surface Vehicle System for Bathymetric Measurements
Wajs, J.; Kasza, D.
Due to the importance of bathymetric measurements for geodesy – the science that accurately measures and understands our planet’s geometric…
Energy Efficient Distributed Adaptive Sampling using Networked Autonomous Underwater Vehicles
Nadeem, M.
While water quality monitoring in real-time is important, it is often difficult to execute due to the constraints of using…
NYUAD Robosub: Automated Underwater Vehicle Adaptation and Control
Nham, M. Q.; Hamdan, R.R.
A team of NYU Abu Dhabi undergraduate students utilizes components, many of them Blue Robotics products, to develop a fully…
Monocular Vision-based Gripping of Objects
Haugaløkken, B.O. A.; Skaldebø, M. B.
Underwater vehicles equipped with manipulators are beneficial tools for subsea inspection, maintenance, and repair operations. Higher levels of autonomous vehicles…
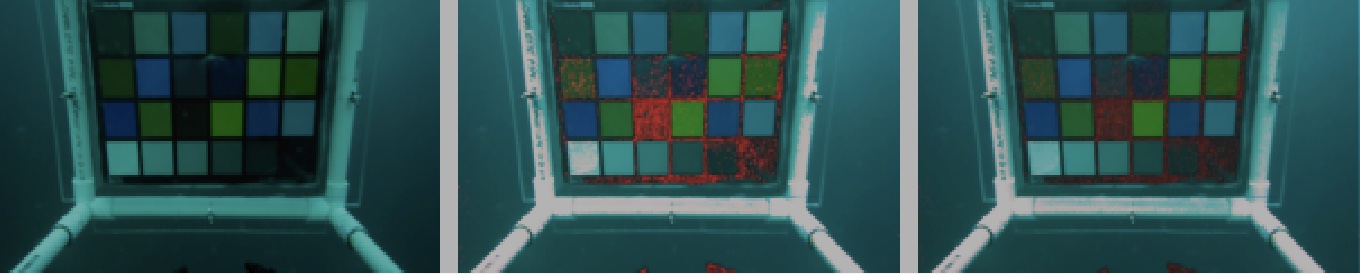
Real-time Model-based Image Color Correction for Underwater Robots
Roznere, M.; Quattrini Li, A.
High quality underwater images are important when reconstructing realistic underwater structures, evaluating the health of coral reefs, or navigating underwater….
Development and Implementation of a Marine Robotics Algorithm Validation Testbed
Anderson, J.; Belcher, B.
Clean water for both drinking and irrigation is a necessary resource, but has little protection. There are regular incidents where…
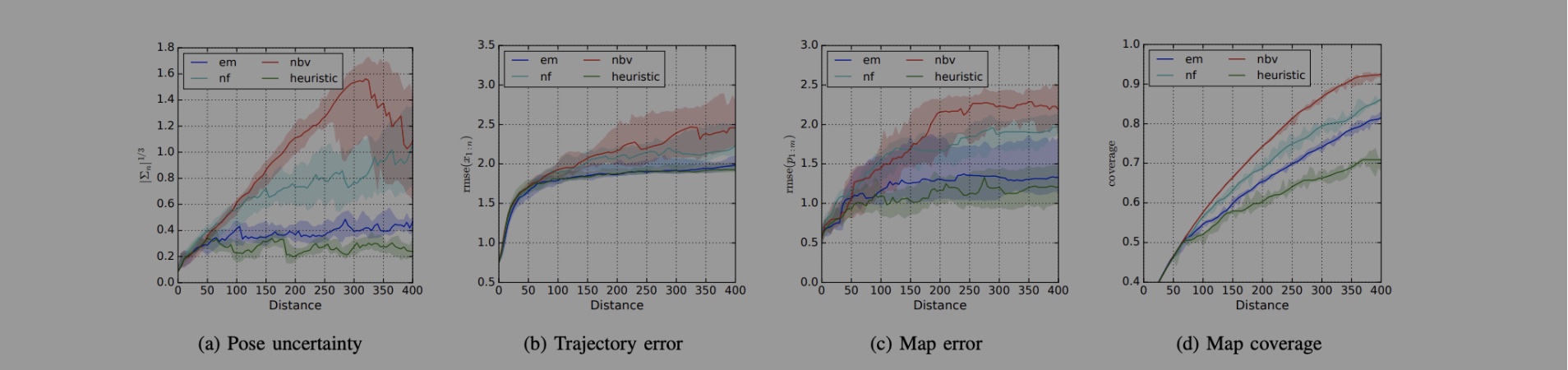
Virtual Maps for Autonomous Exploration of Cluttered Underwater Environments
Wang, J.; Chen, F.
Having an autonomous vehicle actively map an unknown environment is a difficult task and improving this capability would be extremely…