If you missed it, we introduced our Grow Line initiative on our forums a few weeks ago and we’re ready…
Remotely Operated Underwater Vehicles (ROVs) expand our ability to explore and work in our world’s waters. There are tons of…
If you haven’t seen, we have recently released a new 5″ enclosure as well as some really big 6″ and…
Hey there, friends! Welcome back to another annual-ish customer survey summary. It’s been two years since our last survey and…
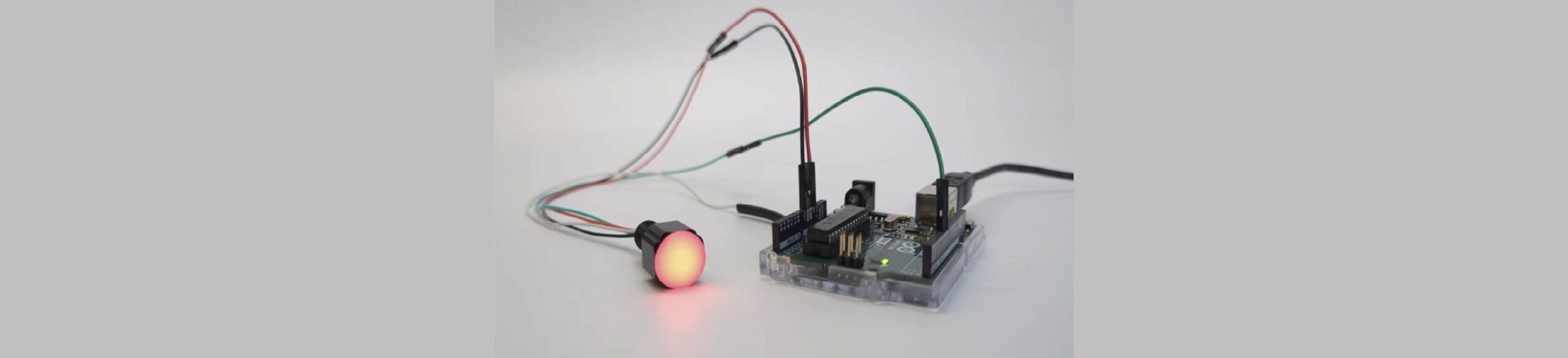
Hi folks, Another new product announcement and this one’s been a long time coming! We’ve added an RGB LED to…
Hi folks, We have another product joining the Reef from our friends at Cerulean Sonar, the Omniscan 450 FS Imaging…
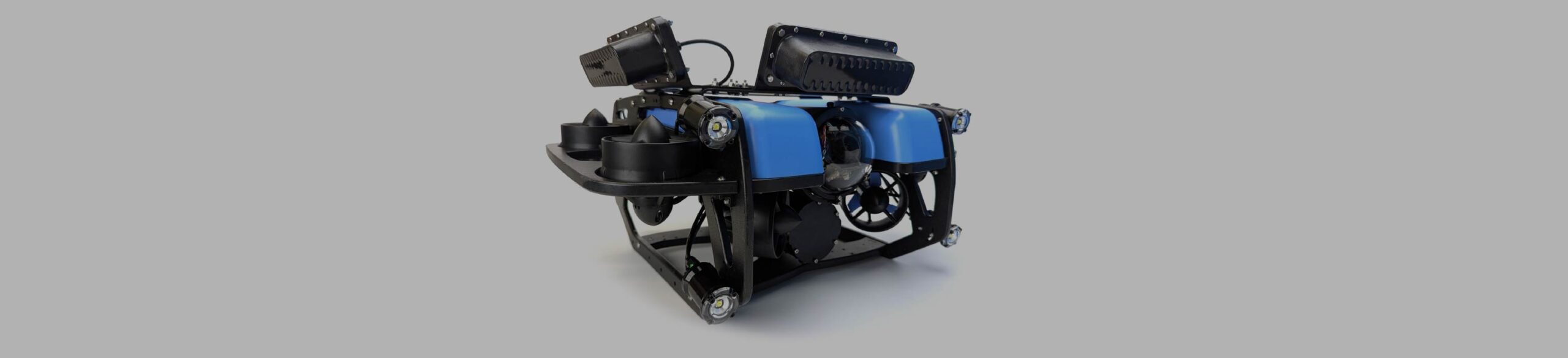
Hi folks, Another product announcement for you: BlueBoats are now available with high-visibility hull colors starting today! Find them as…
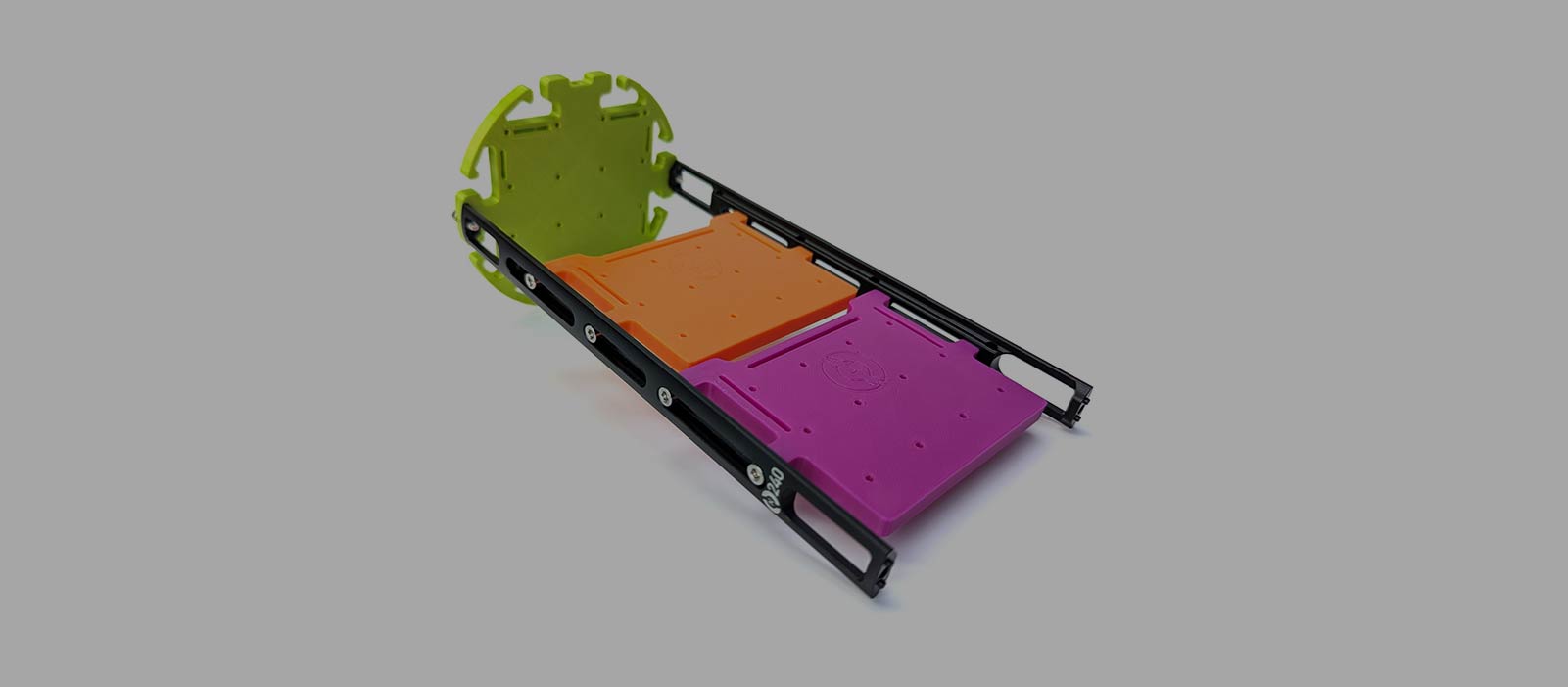
Hi folks, New product announcement for you. RAILS is a modular electronics tray system that makes it easy to mount…