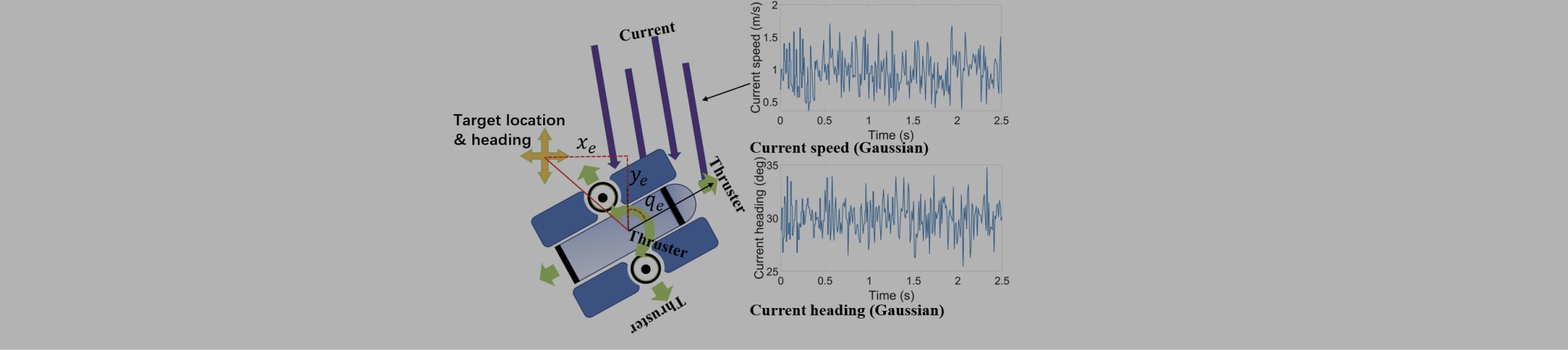
Model-Free High-Order Sliding Mode Controller for Station-Keeping of an Autonomous Underwater Vehicle in Manipulation Task: Simulations and Experimental Validation
González-García, J.; Gómez-Espinosa, A.
AUVs are often used for data-gathering applications, but there is an increasing interest for their use in inspection, maintenance, and…
Fault-Adaptive Autonomy in Systems with Learning-Enabled Components
Stojcsics, D.; Boursinos, D.
Faults and degradations, such as sensor failures, software malfunctions, actuators degradations, etc., can happen anytime and anywhere in a system….
Marine Robotics for Recurrent Morphological Investigations of Micro-Tidal Marine-Coastal Environments
Ridolfi, A.; Secciani, N.
Standard monitoring activities are functional for longer time and spatial scales but can be expensive, complex, and inaccurate in certain…
Tuning for Robust and Optimal Dynamic Positioning Control in BlueROV2
Yang, X.; Xing, Y.
In most ROV operations, accurate and robust navigation is crucial for effective missions. Path tracking or target following are usually…