
In most ROV operations, accurate and robust navigation is crucial for effective missions. Path tracking or target following are usually synonymous with autonomous surface vessels (AUVs), but due to the open-source nature of the BlueROV2, instruments that aid in navigation can be easily integrated so that dynamic positioning is achievable. Yang and Xing investigate the possibilities in this paper!
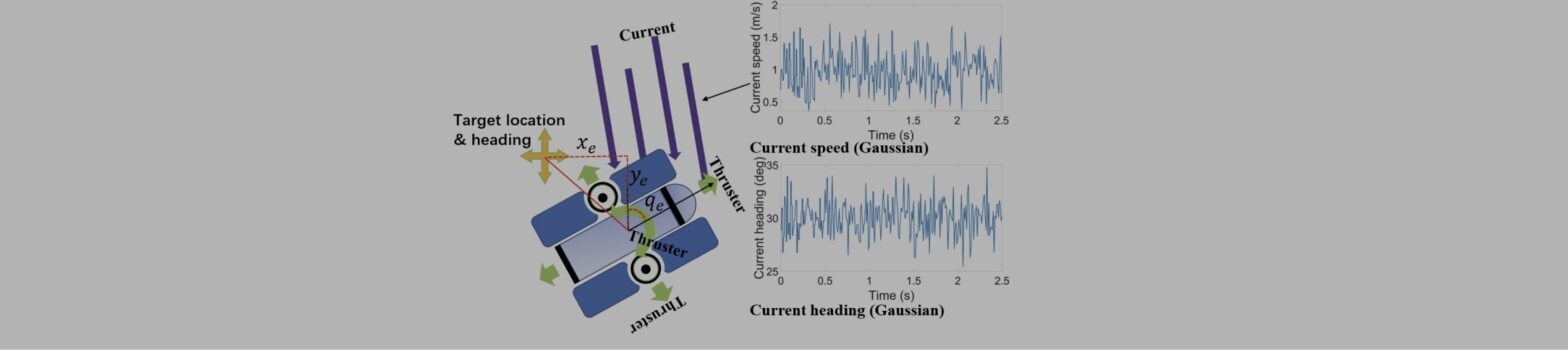
Abstract: A tuning approach for the robust and optimal dynamic positioning control of BlueROV2 subjected to currents with varying speeds and headings is presented. A 2D planar dynamic model of BlueROV2 is developed in Matlab/Simulink and used for the study. The surge, sway and yaw motions are controlled by individual PID controllers. An extensive sensitivity study is carried out on a total of nine cases with different current speeds, current headings, and measurement noise levels. The results show that tuning a model solely using step responses from a linearized model might not produce optimal results. Further it is important to verify the system responses in time domain after tuning. Finally, it is observed that re-tuning the controllers for each simulation case may lead to better performance. However, it is also shown that the base case controller gains are sufficiently robust and lead to good performances for the other simulation cases.
Author: Yang, X.; Xing, Y.
Journal: IOP Science
To read more, click here.