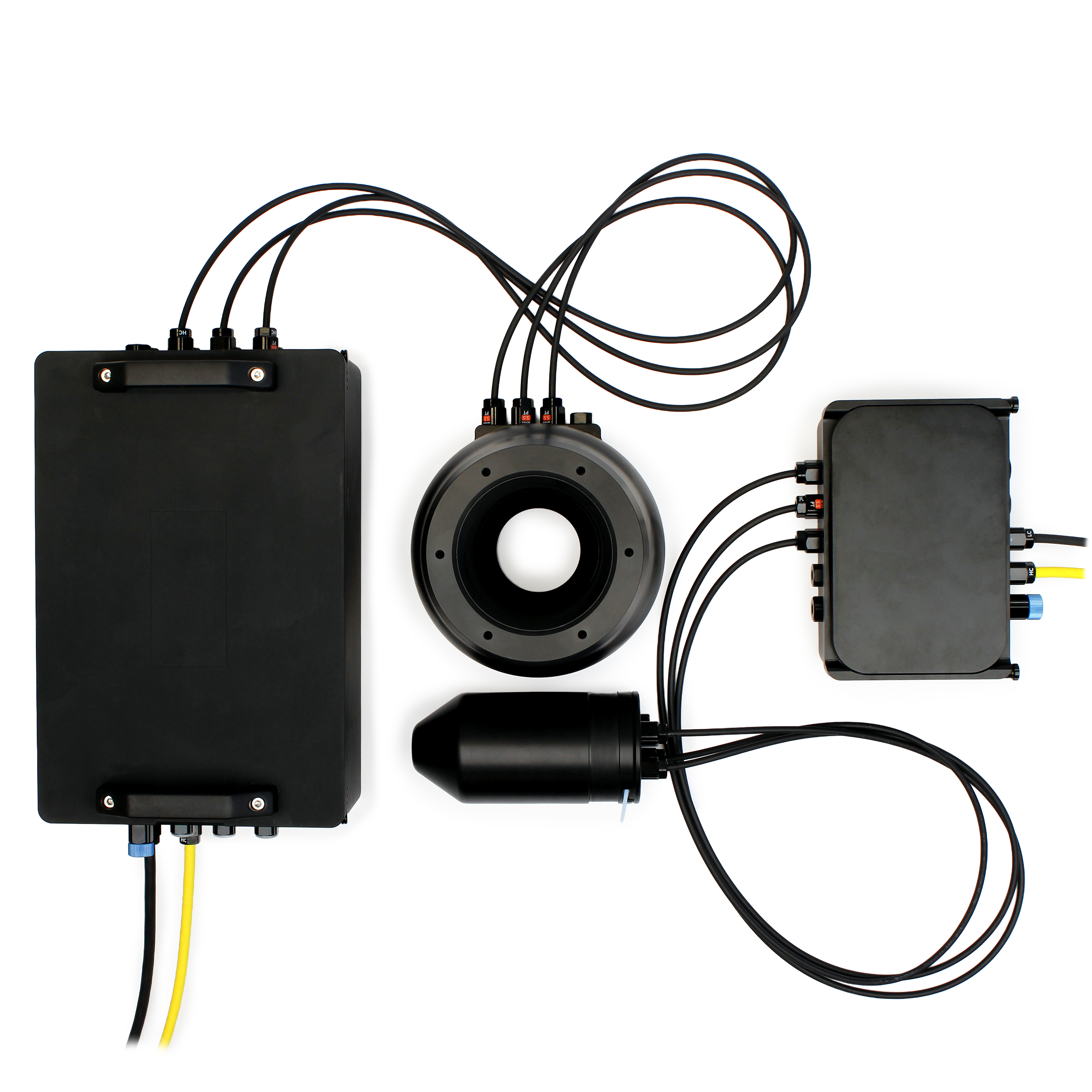
UWCS has two main hardware systems that work together to deliver wireless power and data underwater:
- Transmitter (dock side) – The transmitter connects to a DC power source and generates a high-frequency wireless power signal. This signal travels to the transmit coil that creates an electrical field that transfers power wirelessly. The transmitter and the transmit coil are the “dock” part of the system and can be mounted vertically or horizontally to make it simple for vehicles to line up and start charging. Because it supplies wireless power rather than a fixed DC voltage, a single transmitter can support a diverse fleet of vehicles.
- Onboard Charger (vehicle side) – The vehicle is equipped with a small onboard charger connected to a receive coil. This circuit collects the wireless power from the receive coil and converts it back into a usable DC voltage. The onboard charger is a fully programmable battery charger that follows the correct charge cycles for a wide range of batteries, including all lithium chemistries. Operators can tune output voltage and current to optimize charging for any battery onboard.
To charge, the vehicle docks the receive coil into the transmit coil to begin wireless power transfer up to 150 W. A separate set of coils in the same housing creates a data connection for communication via Ethernet between the vehicle and the dock to offload data or provide updated mission instructions.
The whole system is controlled using the WiBotic Control Panel, a web-based interface hosted on the transmitter accessed over the local network or over the internet. It lets operators monitor live charging, adjust charging parameters like voltage and current, and manage multiple vehicles in a fleet.