A stereo camera works a lot like human eyes. It uses two lenses to capture images from slightly different perspectives, then compares the small differences between those images to calculate depth and distance, creating 3D perception. Because the cameras are separated by a fixed distance, called the baseline, scale can be measured from the imagery. That makes stereo cameras a powerful tool for applications like autonomous vehicle navigation, robotic exploration, environmental monitoring, distance and size measurement, and 3D mapping and photogrammetry.
MarineSitu C3 Stereo Camera





$3,950.00
The MarineSitu C3 is an underwater stereo vision camera that captures depth information and high-resolution color imagery. It uses a pair of stereo cameras to perceive depth, along with a center color camera for high resolution imagery, all housed in a rugged enclosure rated to 1000 meters depth. Designed for marine robotics and research applications.
The C3 ships ready to install with a mounting bracket for the BlueROV2 and a preinstalled WetLink Penetrator. It connects over Ethernet, so an onboard Ethernet Switch is required for operation.
6 in stock
Product Description
The MarineSitu C3 brings those stereo vision capabilities underwater. It’s built around the Luxonis OAK-D stereo camera, housed in a durable POM plastic enclosure with a quartz lens and rated to 1000 meters depth. Each unit is individually calibrated for underwater operation to ensure accurate depth and scale in marine environments.

Perceive Depth. At Depth.
The C3 uses two monochrome stereo cameras spaced 7.5 centimeters apart to capture depth data, along with a 12-megapixel center color camera for high-resolution imagery. Wide field of view stereo sensors with global shutters deliver sharp, stable images even when the vehicle or scene is in motion.
The MarineSitu C3 comes with a preinstalled WetLink Penetrator and a stainless steel mounting bracket with hardware for easy installation on the BlueROV2. It connects via Ethernet, so you’ll need an Ethernet Switch for integration. Check out the full integration guide for all the details.
Once connected, use the Madrona BlueOS extension to configure video streams and image capture, then use the free C3 Data Review App to review, annotate, and measure captured images after your dive.
For developers, the C3 is also compatible with the Luxonis OAK software ecosystem for advanced computer vision applications and ROS integration.
Product Description
A stereo camera works a lot like human eyes. It uses two lenses to capture images from slightly different perspectives, then compares the small differences between those images to calculate depth and distance, creating 3D perception. Because the cameras are separated by a fixed distance, called the baseline, scale can be measured from the imagery. That makes stereo cameras a powerful tool for applications like autonomous vehicle navigation, robotic exploration, environmental monitoring, distance and size measurement, and 3D mapping and photogrammetry.
The MarineSitu C3 brings those stereo vision capabilities underwater. It’s built around the Luxonis OAK-D stereo camera, housed in a durable POM plastic enclosure with a quartz lens and rated to 1000 meters depth. Each unit is individually calibrated for underwater operation to ensure accurate depth and scale in marine environments.
Perceive Depth. At Depth.
The C3 uses two monochrome stereo cameras spaced 7.5 centimeters apart to capture depth data, along with a 12-megapixel center color camera for high-resolution imagery. Wide field of view stereo sensors with global shutters deliver sharp, stable images even when the vehicle or scene is in motion.
The MarineSitu C3 comes with a preinstalled WetLink Penetrator and a stainless steel mounting bracket with hardware for easy installation on the BlueROV2. It connects via Ethernet, so you’ll need an Ethernet Switch for integration. Check out the full integration guide for all the details.
Once connected, use the Madrona BlueOS extension to configure video streams and image capture, then use the free C3 Data Review App to review, annotate, and measure captured images after your dive.
For developers, the C3 is also compatible with the Luxonis OAK software ecosystem for advanced computer vision applications and ROS integration.
- 1 x MarineSitu C3 Stereo Camera
- 1 x M10 bulkhead nut & -013 O-ring (installed on cable)
- 1 x Lens cover
- 1 x Mounting bracket
- 2 x Rubber bumper feet
- 2 x M5x45 socket head screw
- 4 x M5x25 button head screw
- 4 x M5x10 button head screw
- 6 x M5 lock nut
- 1 x 3 mm hex key
Specifications
| Parameter | Value |
|---|---|
| Optical | |
| Camera Model | Luxonis Oak-D W PoE Center: IMX378 Stereo pair: OV9282 |
| Image Resolution | 12 MP color camera, 1 MP stereo pair cameras |
| Frame Rate | Max: 60 FPS color, 120 FPS stereo (1 Gbit bandwidth) Typical¹: 3 FPS color, 5 FPS stereo (15–20 Mbit) |
| DFOV/HFOV/VFOV | Center: 78.7°/66.5°/52.5° Stereo pair: 89.5°/80°/55.5° |
| Focal Range | Center: 60 cm–infinity Stereo pair: 18 cm–infinity |
| Baseline | 7.5 cm |
| Electrical | |
| Input Voltage | 12–24V |
| Power Consumption | 3 watt nominal, 5 watt max @ 12V |
| Communication | |
| Interface | 1000BASE-T Ethernet ² |
| Bandwidth Consumption | Up to 1Gbit (requires gigabit switch) |
| Cable | |
| Cable Length | 1000 ±25 mm |
| Connector Type | 4-position JST GH (Ethernet) Spade (power) |
| WetLink Penetrator Size | M10-8.5MM-LC |
| Bulkhead O-ring | AS568-013 Buna-N 70A |
| Physical | |
| Maximum Rated Depth (seawater) | 1000 m |
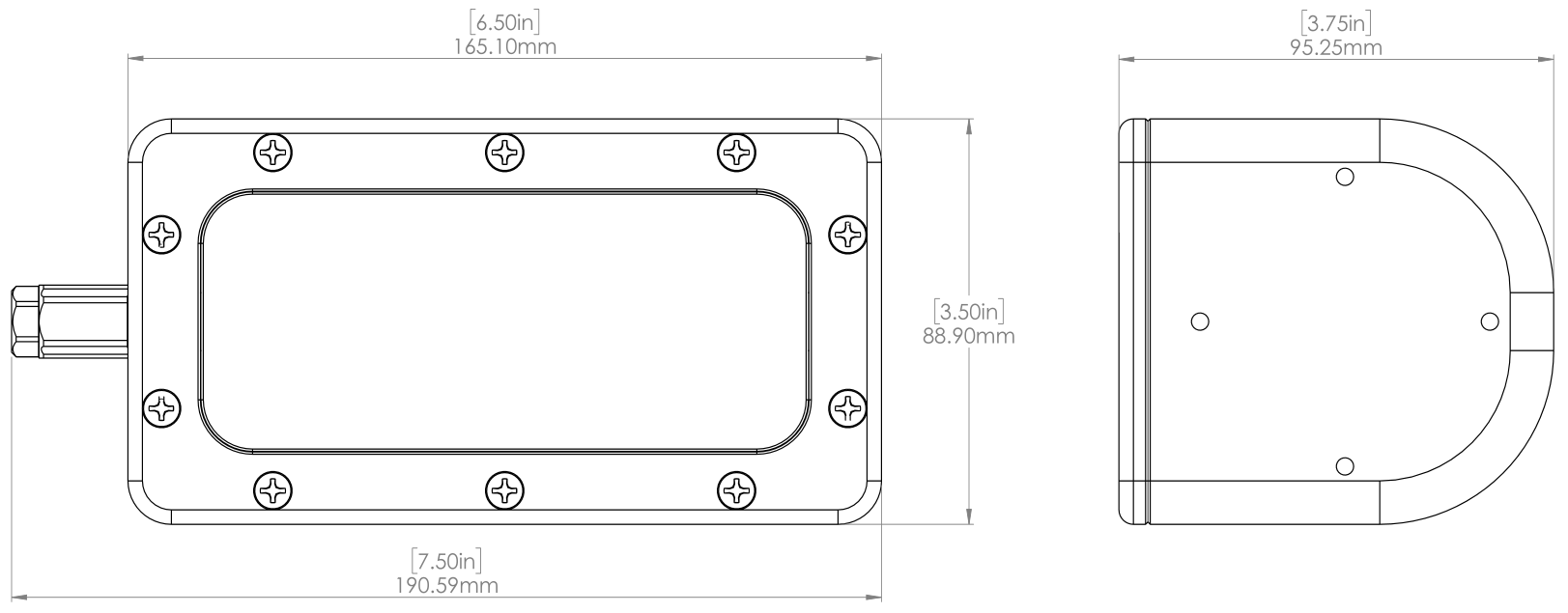
| Dimensions (L x W x H) | 95 x 165 x 89 mm |
| Wetted Materials | POM Quartz lens Stainless steel 316 Polyurethane Aluminum Buna N |
| Weight in Air ³ | 1700 g |
| Weight in Water ³ | 430 g |
| ¹ For live view with BlueROV2 and standard tether. ² BlueROV2 supports up to 100BASE-T. ³ Not including mounting bracket or hardware. |
|
2D Drawings
C3 Stereo Camera
3D Models
MARINESITU_C3_BR-105923 (.zip)
Revision History
16 December 2025
- BR-105923 – Initial release
Integrating the MarineSitu C3 Stereo Camera on the BlueROV2
Learn how to integrate the MarineSitu C3 Stereo Camera on the BlueROV2!