
Today we have a very special new product announcement. We’re partnering with Water Linked, a Norwegian company, and announcing the release of a revolutionarily low-cost Underwater GPS system. This new product, the Water Linked Underwater GPS Explorer Kit combines a traditional GPS receiver and compass with an acoustic positioning system to provide positioning information underwater. We think this technology will be revolutionary to how we use ROVs.
We’re partnering with Water Linked as their first and only distributor for this system, and it will also be supported out of the box in ArduSub and the BlueROV2.
The Technology
The Water Linked positioning uses something called Short Baseline (SBL) acoustic positioning. Basically, the ROV has locator beacon that sends out an acoustic pulse. Near the surface, there are four receiver hydrophones lowered into the water. The hydrophones listen for the pulse from the locator beacon and use difference in the time-of-arrival to each receiver to triangulate the ROV’s position. SBL systems, compared to the USBL systems more often used on ROVs, have the advantage of working well in shallow water and noisy acoustic environments, such as in a fish cage.
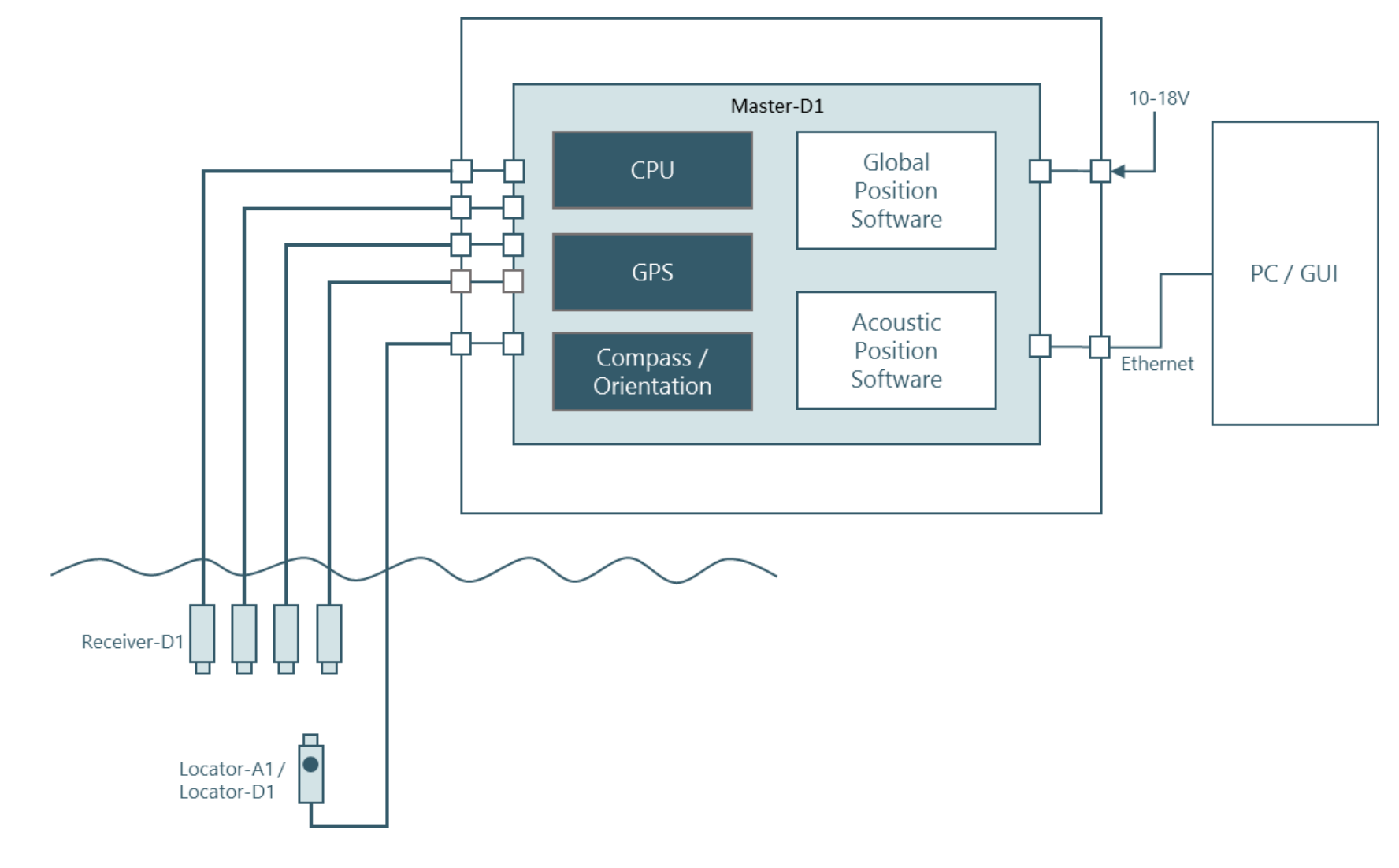
Once the position is known relative to the receivers, the global position can be found by adding that to the position obtained by a GPS receiver. The Water Linked Underwater GPS system does that part internally so that it can provide the actual global position of the ROV as it’s output.
Why It’s Important
The addition of position information when operating an ROV or other marine robotic vehicle is a big change. It means that photos from inspections can be geotagged, targets with known coordinates can be found easily, and ROV can even be programmed to do autonomous actions, such as holding position in a current or following a set of GPS waypoints.
The Water Linked Underwater GPS Developer Kit
Today were launching the Underwater GPS system in a kit that includes all of the required hardware. The software is in a functional state already, but will be improved quite a bit over the next few months. That includes the addition of a well-documented API, performance improvements, and added features. The system includes everything you need to get started – check out the individual product pages for more details, datasheets, and info.
Orders can be placed today but please note that the first systems won’t ship until about June 15th of this year.
The components of this system will also be available separately as spares or for integration directly into your project. We aren’t selling these items separately yet, but they’ll be available once the product is shipping.
Demo Videos
The guys from Water Linked visited us last month to integrate the Underwater GPS system with the BlueROV2 and show exactly how well it works. We put together three fantastic videos demonstrating the system as we started to test it. These video demonstrate just the early capabilities and performance of the system.
BlueROV2 Position Hold in a Tank with Underwater GPS Positioning:
BlueROV2 Autonomous Navigation with Underwater GPS Positioning:
BlueROV2 Manually Piloted to a Wreck at a Known GPS Coordinate:
We’re announcing this in conjunction with the Ocean Business 2017 event in Southampton, UK. If you happen to be there this week, please come visit us at Stand V42!
So uh, what’s the minimum number of the $800 attachments that can be plugged into this thing and still have it find a rov? Does it require all 4 of the relievers to operate?
Hi Tim,
Great question. The underwater GPS system requires four receivers, and one of the more expensive locators to operate. This is what comes standard with the developer kit.
-Jacob
Darn, I was afraid of that heh. Ok, guess i’ll have to start saving up for one of these. Anyone know of any ROV equipment grants out there by any chance?
How does this interface with the ROV? Are you using an internal network switch to link the bottomside board and the PI and send both signals up one fathom X tether? or are you adding a second fathom X tether and using 2 additional pairs on the tether with a switch on the topside?