Blue Robotics will be closed for a national holiday on Friday, July 4th. We will resume normal operations on Monday, July 7th. Dismiss
Subsea Scholar
Practical identification approach for the actuation dynamics of autonomous surface vehicles with minimal instrumentation
Morel, T., Orihuela, L.
This study introduces an easy way to figure out how an ASV moves and how its propellers work using minimal…
AQUA-SLAM: Tightly-Coupled Underwater Acoustic-Visual-Inertial SLAM with Sensor Calibration
Shida Xu, S., Zhang, K.
Underwater environments are tough for mapping and navigation systems. To solve this, the researchers introduce AQUA-SLAM, a new system that…
Detection of Underwater Mines Using Sonar
Pirot, L.
Detecting underwater mines and unexploded ordnance, particularly those buried under sand, is challenging and poses a threat to maritime navigation…
Modifications to ArduSub That Improve BlueROV SITL Accuracy and Design of Hybrid Autopilot
Ng, P., Krieg, M.
Researchers focus on improving the BlueROV2 Heavy’s software and control systems for better simulation accuracy and autonomous operation. They updated…
Marine Vehicle Characterization and Implementing Various Levels of Autonomy
Ng, P.
To make piloting ROVs easier, researchers at the University of Hawai’i created an augmented/virtual reality interface and a hybrid autopilot…
BlueME: Robust Underwater Robot-to-Robot Communication Using Compact Magnetoelectric Antennas
Talebi, M.; Mahmud, S.
In this study, BlueME, a compact magnetoelectric (ME) antenna array system for underwater robot-to-robot communication, is deployed on the BlueBoat…
Use of an uncrewed surface vehicle and near infrared hyperspectral imaging for sampling and analysis of aquatic microplastics
Faltynkova, A.; Deschênes, C.E.
Collecting environmental data on microplastics is critical, but challenging. In this study, researchers use an uncrewed surface vehicle (USV) and…
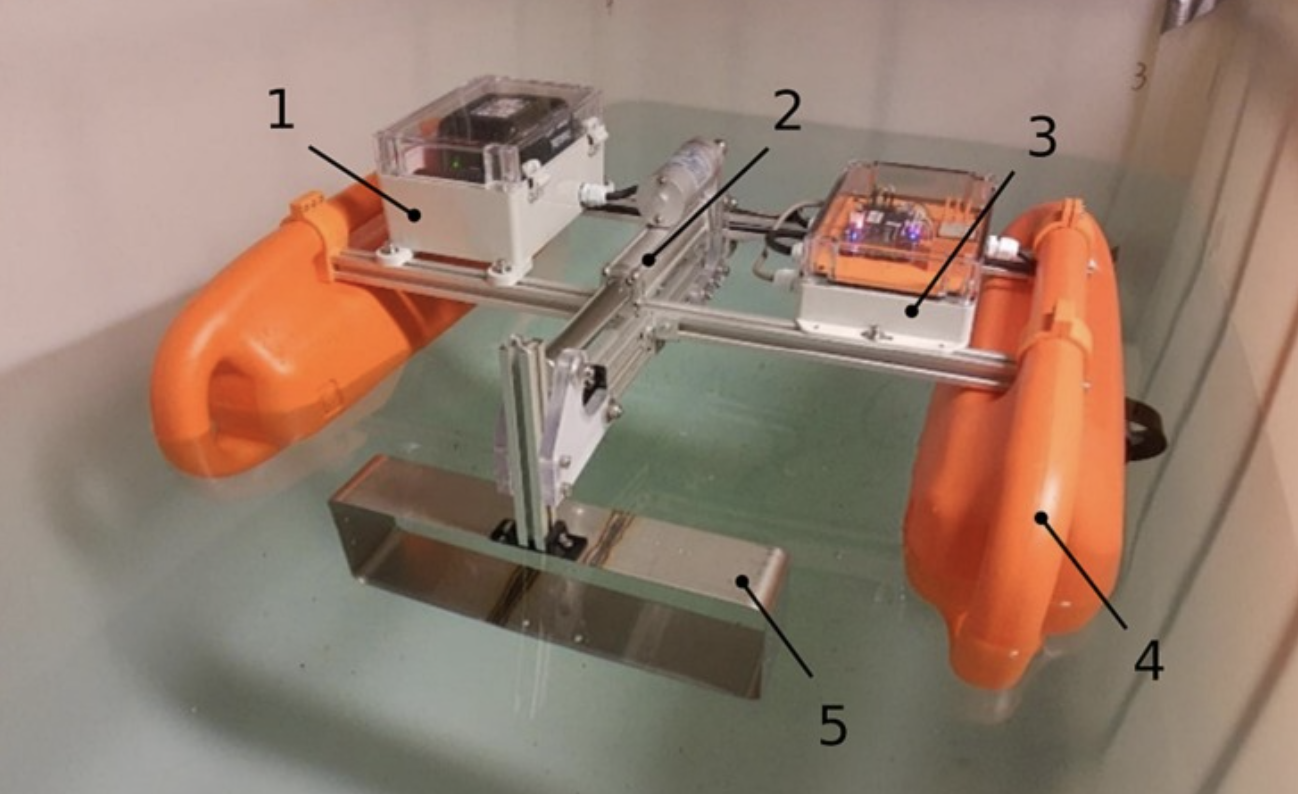
Portable Catamaran Drone – an uncrewed sampling vehicle for micro-plastics and aquaculture research
Zolich, A.; Faltynkova, A.
One of the most common methods for surface water particle collection (for micro-plastics, plankton, or zooplankton research) is a manta-trawl,…
“Scouring for Prehistory”—An Opportunistic Methodology for Sea Floor Archaeology
Garrison , E. G.; Carter Jones, E.
Decades of attempts to locate prehistoric sites on the sea floor have proven fairly unsuccessful. Here, the authors attempt new…
Review and Enhancement of Remotely Operated Vehicles for Marine Pest Surveillance: Phase 2 Project Report
Ellard, K.
The Tasmanian ROV Project, which explored the utilization of observation-class ROVs for marine pest surveillance programs, was completed in two…