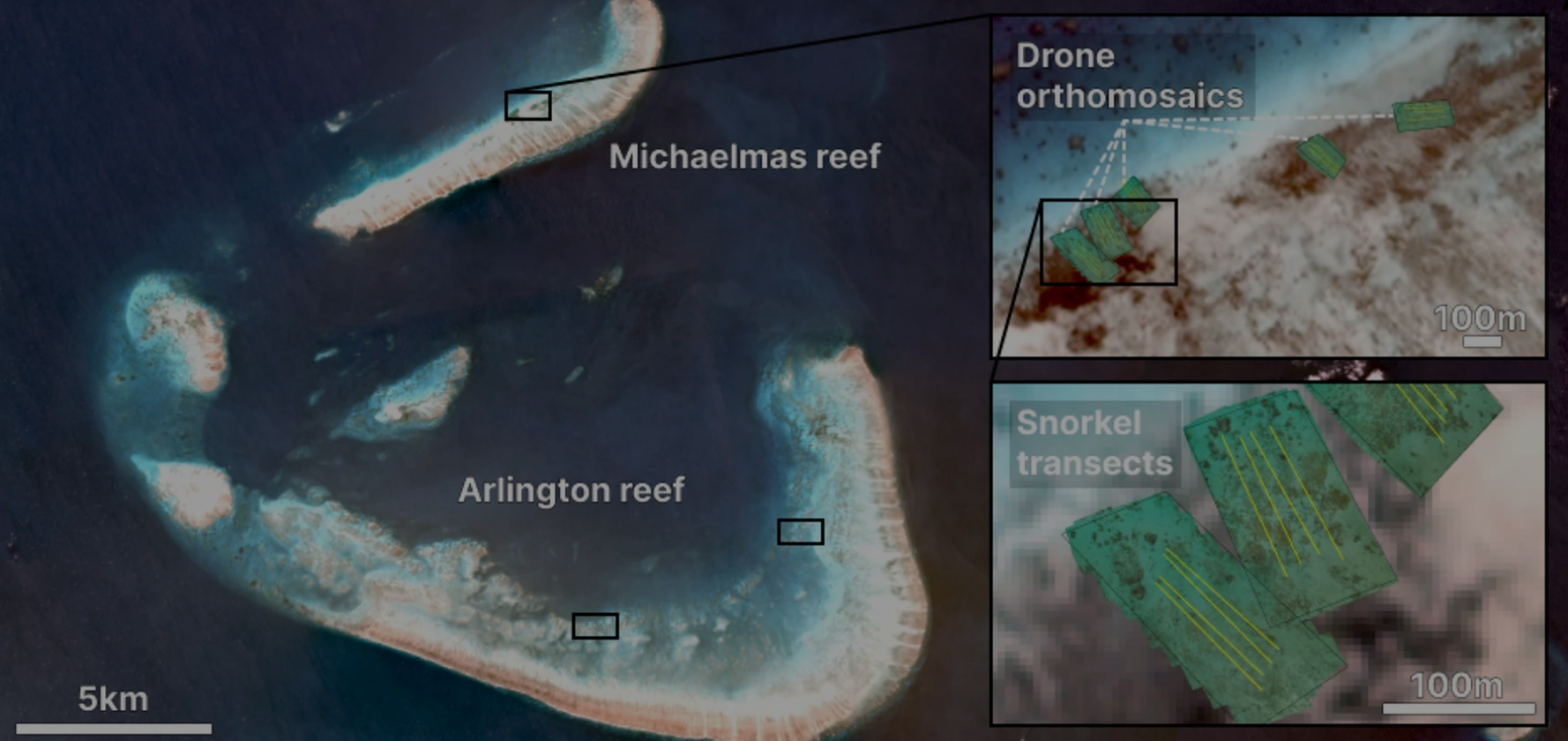
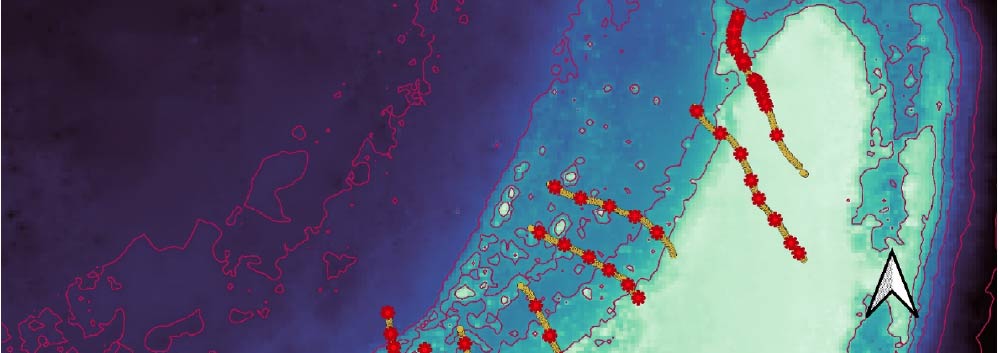
Modernising sea cucumber surveys using remotely operated vehicles and aerial drones
Williamson, J. E., Joyce, K. E.
Researchers set out to evaluate whether aerial drones and ROVs could serve as faster, more flexible alternatives to traditional snorkel…
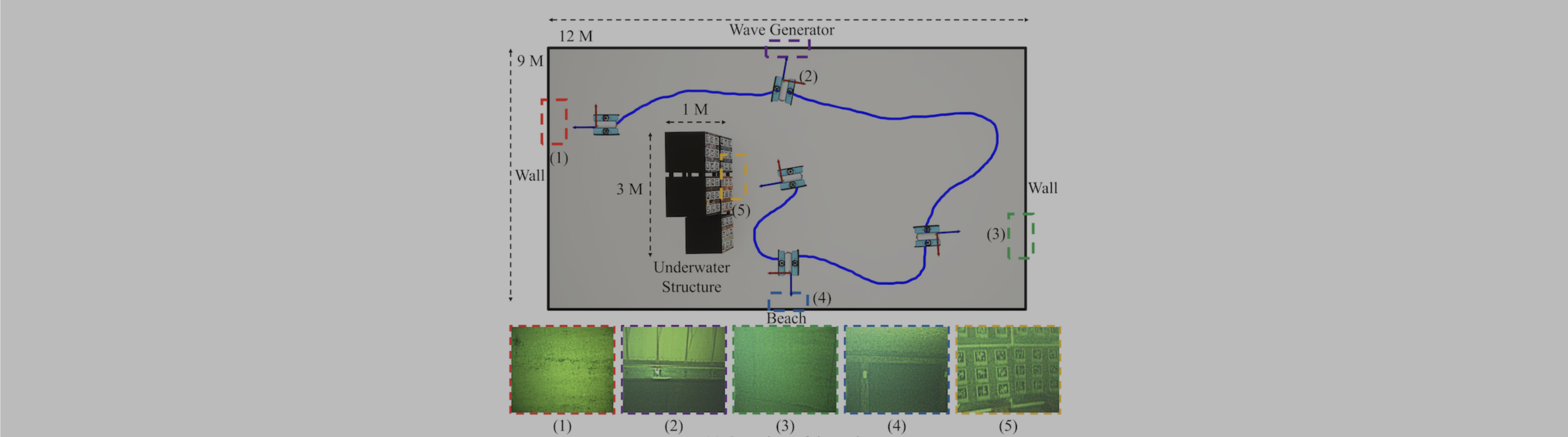
Rapid surveying of benthopelagic ecosystems with a towed mini-ROV
Raoult, V., McSpadden, K.
Researchers towed a BlueROV2 for surveying benthic communities as a faster, deeper alternative to traditional snorkel and SCUBA surveys. Where…
Monitoring behavior of post-smolts Atlantic salmon (Salmo salar) during their first month after sea transfer…
Sauphar, C., Bolinches, P.
Researchers deployed the Ping360 Scanning Sonar to monitor Atlantic salmon in a commercial sea cage during the first six weeks…
Practical identification approach for the actuation dynamics of autonomous surface vehicles with minimal instrumentation
Morel, T., Orihuela, L.
This study introduces an easy way to figure out how an ASV moves and how its propellers work using minimal…
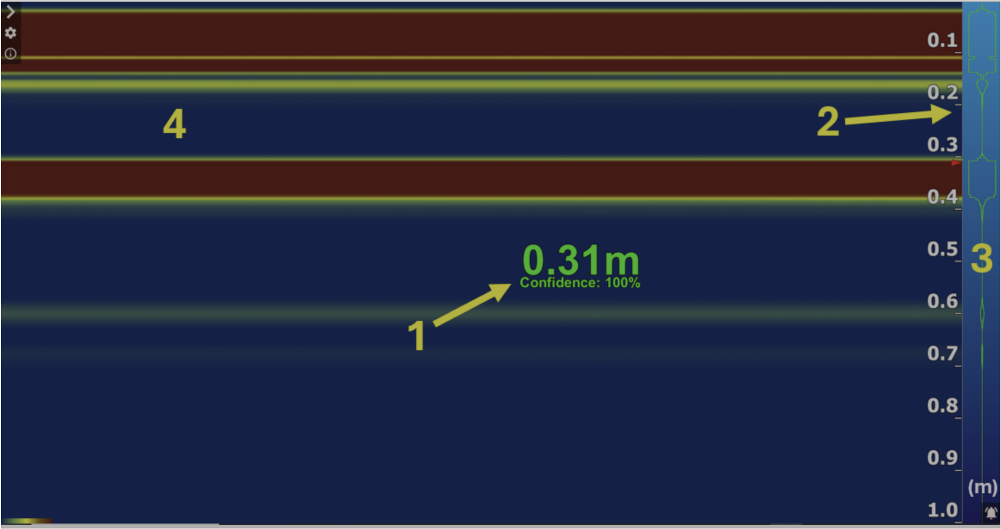
AQUA-SLAM: Tightly-Coupled Underwater Acoustic-Visual-Inertial SLAM with Sensor Calibration
Shida Xu, S., Zhang, K.
Underwater environments are tough for mapping and navigation systems. To solve this, the researchers introduce AQUA-SLAM, a new system that…
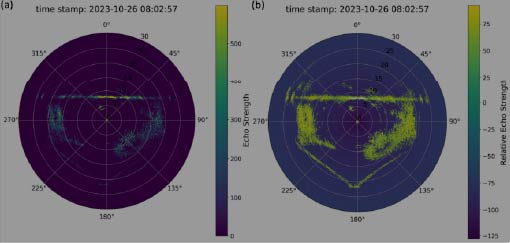
Detection of Underwater Mines Using Sonar
Pirot, L.
Detecting underwater mines and unexploded ordnance, particularly those buried under sand, is challenging and poses a threat to maritime navigation…
Modifications to ArduSub That Improve BlueROV SITL Accuracy and Design of Hybrid Autopilot
Ng, P., Krieg, M.
Researchers focus on improving the BlueROV2 Heavy’s software and control systems for better simulation accuracy and autonomous operation. They updated…
Marine Vehicle Characterization and Implementing Various Levels of Autonomy
Ng, P.
To make piloting ROVs easier, researchers at the University of Hawai’i created an augmented/virtual reality interface and a hybrid autopilot…
BlueME: Robust Underwater Robot-to-Robot Communication Using Compact Magnetoelectric Antennas
Talebi, M.; Mahmud, S.
In this study, BlueME, a compact magnetoelectric (ME) antenna array system for underwater robot-to-robot communication, is deployed on the BlueBoat…
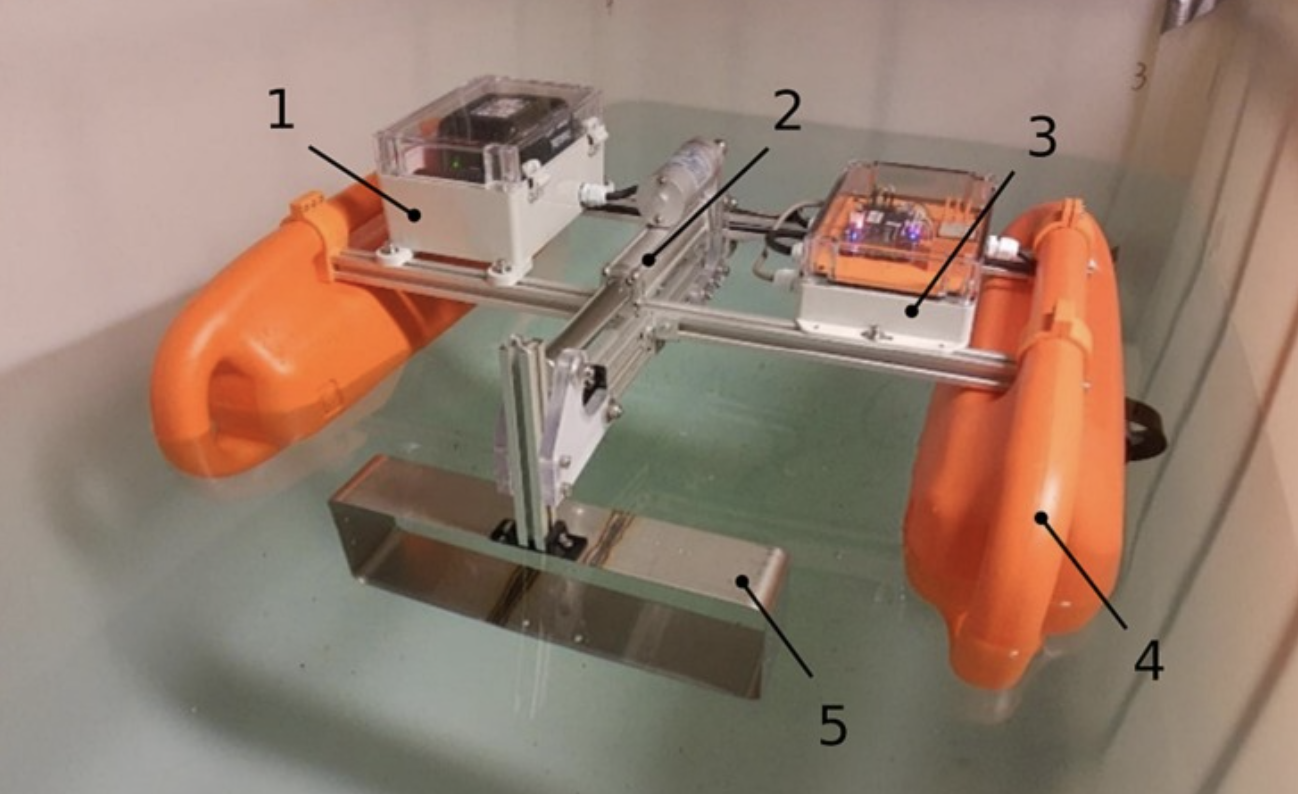
Use of an uncrewed surface vehicle and near infrared hyperspectral imaging for sampling and analysis of aquatic microplastics
Faltynkova, A.; Deschênes, C.E.
Collecting environmental data on microplastics is critical, but challenging. In this study, researchers use an uncrewed surface vehicle (USV) and…