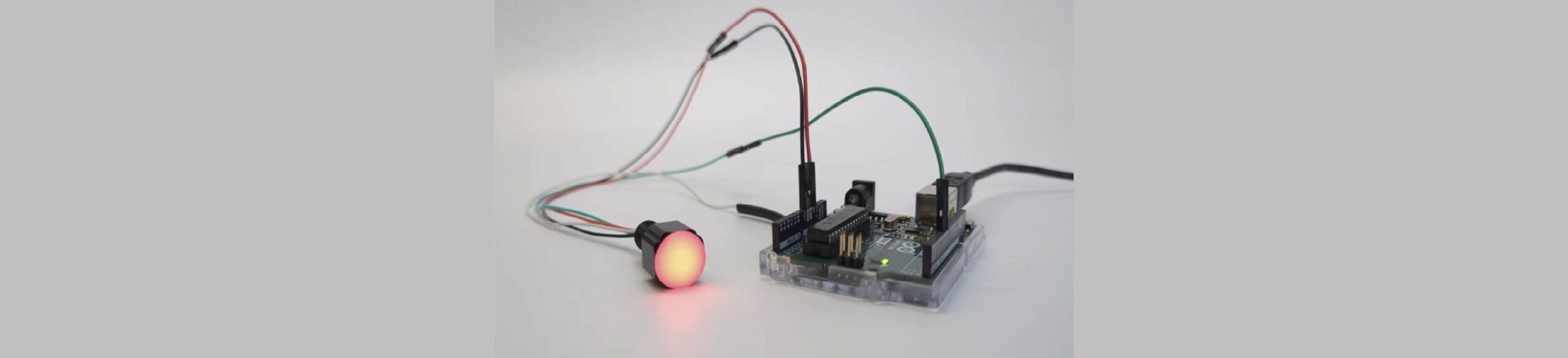
New Product! The Subsea RGB LED IndicatorMar 25, 2025 - Nicolette PurcellHi folks, Another new product announcement and this one’s been a long time coming! We’ve added an RGB LED to…
New on the Reef: Cerulean Omniscan 450 FS Imaging SonarMar 18, 2025 - Nicolette PurcellHi folks, We have another product joining the Reef from our friends at Cerulean Sonar, the Omniscan 450 FS Imaging…
High-Visibility BlueBoat Colors Available NowMar 4, 2025 - Nicolette PurcellHi folks, Another product announcement for you: BlueBoats are now available with high-visibility hull colors starting today! Find them as…
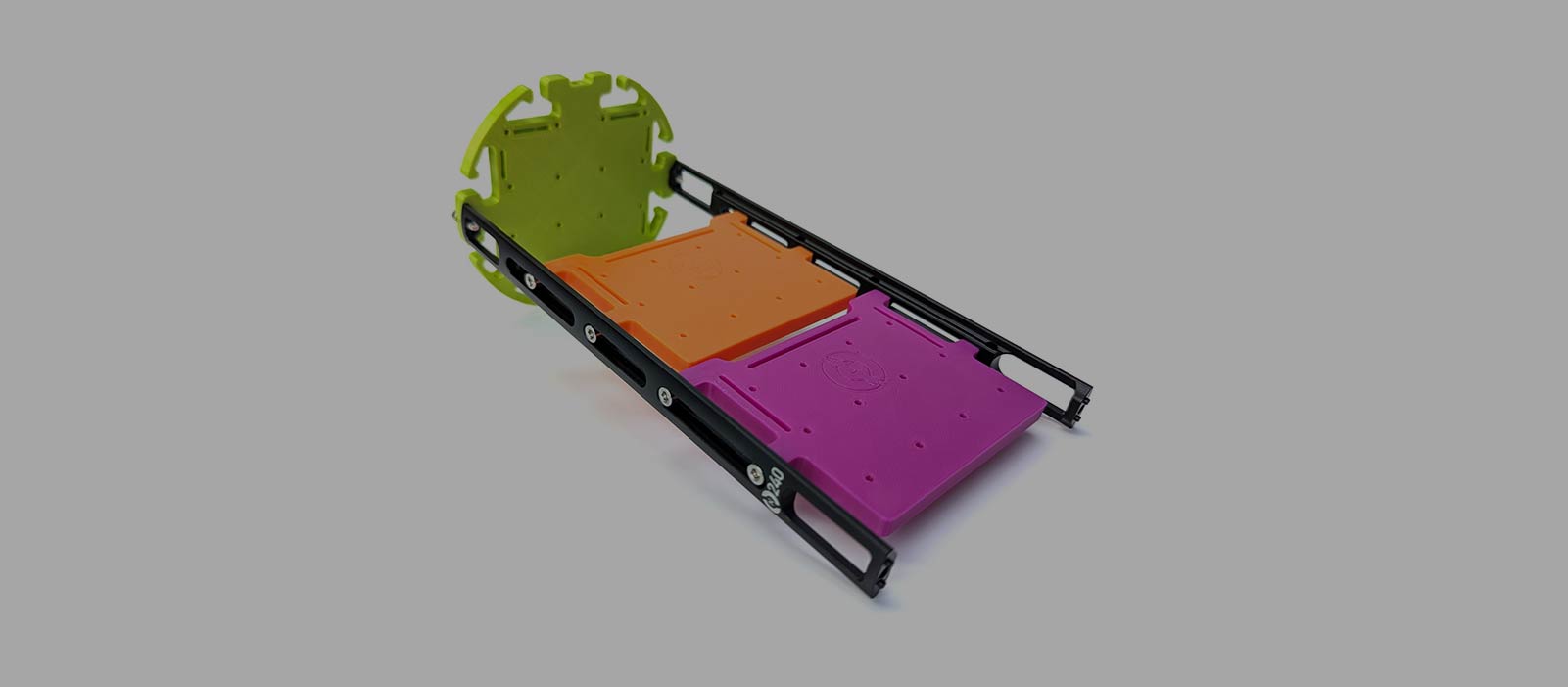
Level Up Your Watertight Enclosures with RAILS: the Really Awesome Internal Layout SystemFeb 19, 2025 - Nicolette PurcellHi folks, New product announcement for you. RAILS is a modular electronics tray system that makes it easy to mount…
New Product Announcement: Tef-Gel, Bulkhead Adapters, and O-ringsNov 13, 2024 - Nicolette PurcellHi folks, another round of new products for ya! First up: Tef-Gel is now available for purchase directly from our…
Boost BlueBoat and BaseStation Communication Range with the BaseStation Directional Antenna KitOct 23, 2024 - Nicolette PurcellHi folks, New product announcement for you. The BaseStation Directional Antenna Kit can boost the communication range between the BaseStation…
Introducing Cockpit!!!Aug 20, 2024 - Nicolette Purcell🎉 *Big News from Blue Robotics!* 🚀 We’re ecstatic to announce the first stable release of Cockpit, our customizable ground…
Get (cl)Amped for These New Clamps!Aug 19, 2024 - Nicolette PurcellHi folks, Another new product announcement for you. We’ve expanded our line of Watertight Enclosure Clamps! We now have clamp…
New 6S Battery Splitter Cable for BlueBoat - Nicolette PurcellHello folks, Quick new product announcement for you. The BlueBoat battery splitter cable is now available in a 6S version…
Introducing the Watertight Box!May 2, 2024 - Nicolette PurcellGood day blue people!!! 🤘 We are excited to add watertight boxes to our enclosure lineup! Although most subsea projects…